Как должны быть установлены винты на квадрокоптере
Мультикоптеры требуют вращение двигателей в определенных направлениях в зависимости от их конфигурации.
Производя первоначальные установки вы должны убедиться в правильном вращении каждого двигателя.
Эта страница дает инструкции по настройке направления двигателей, выбору пропеллеры и их соединению.
Проверка направление вращения двигателя
-
Убедитесь, что нет установленных пропеллеров на вашем квадрокоптере!
-
Включите аппаратуру и установите режим полета Stabilize (Стабилизация).
-
Подключите LiPo батарею.
-
Снимите с охраны квадрокоптер (Arming) удерживая стик газа вниз и положение руддера вправо. (нижняя правое положение) в течение пяти секунд.
-
Если квадрокоптер не снимится с охраны после этих действий, возможно его полетный контроллер нашел предполетную ошибку (Pre-Arm Safety Check).
-
Безопасная предполетная проверка синаглизирует ошибку циклическим двойным миганием красного светодиода.
-
Если вы не можете пройти предполетную проверку безопасности , о посетите страницу Prearm Safety Check и исправите проблему или отключить эту проверку, прежде чем продолжать.
-
Когда вы сняли с охраны квадрокоптер (arming) дайте небольшое количество газа и наблюдайте за направлением вращения каждого двигателя.
Установите правильные направления вращения
Теперь, когда ваши двигатели вращаются, мы установим правильное направление для каждого двигателя.
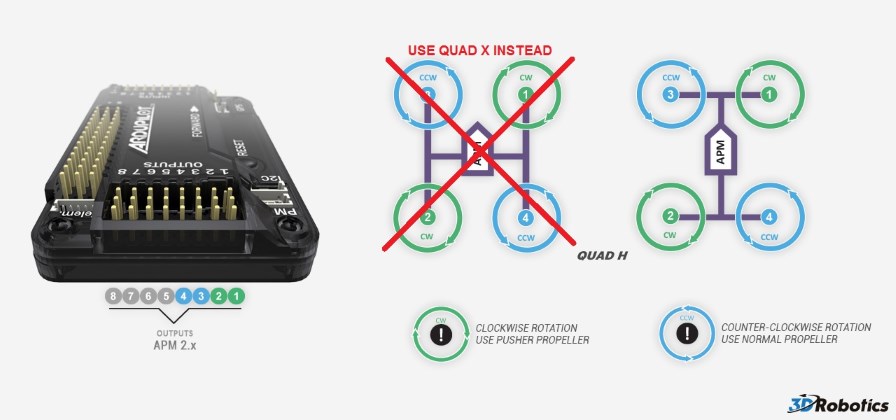
Направление вращения двигателей (по часовой стрелке или против часовой стрелки) определяеюся подключением к регуляору ESC.
Когда вы подадите небольшое количество газа , проверьте и посмотрите направление движения каждого двигателя
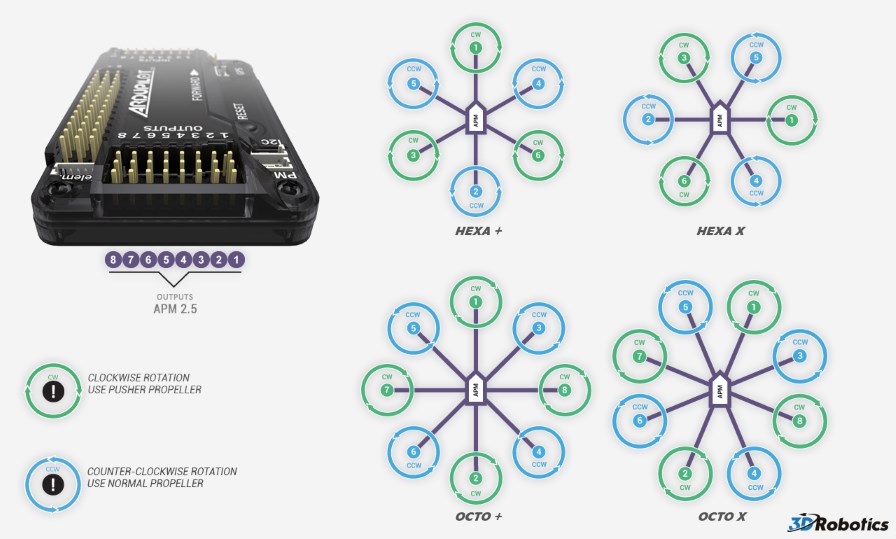
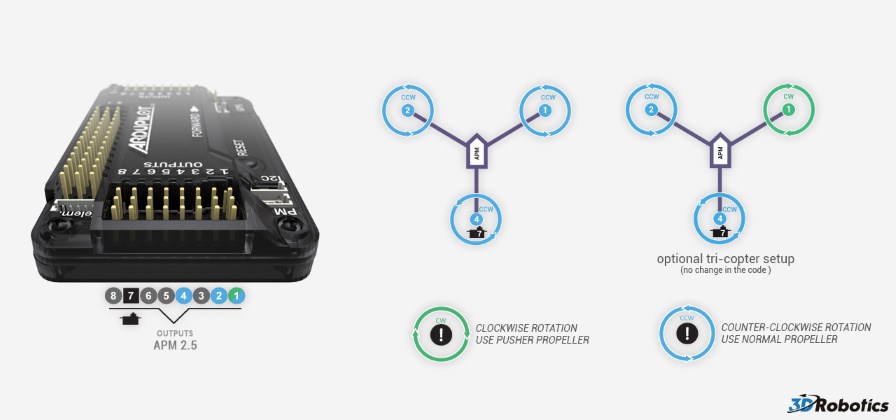
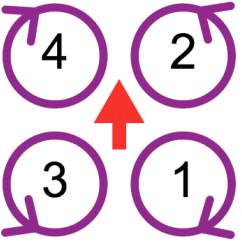
Моторы должны вращаться , как указано на диаграммах ниже в зависимости от типа рамы квадрокоптера.
Проверьте схему вращения двигателей указанную ниже , что бы проверить и убедится, что двигатели производят вращения в правильном направлении.


Скорее всего некоторые из ваших моторов нужно будет переключить.
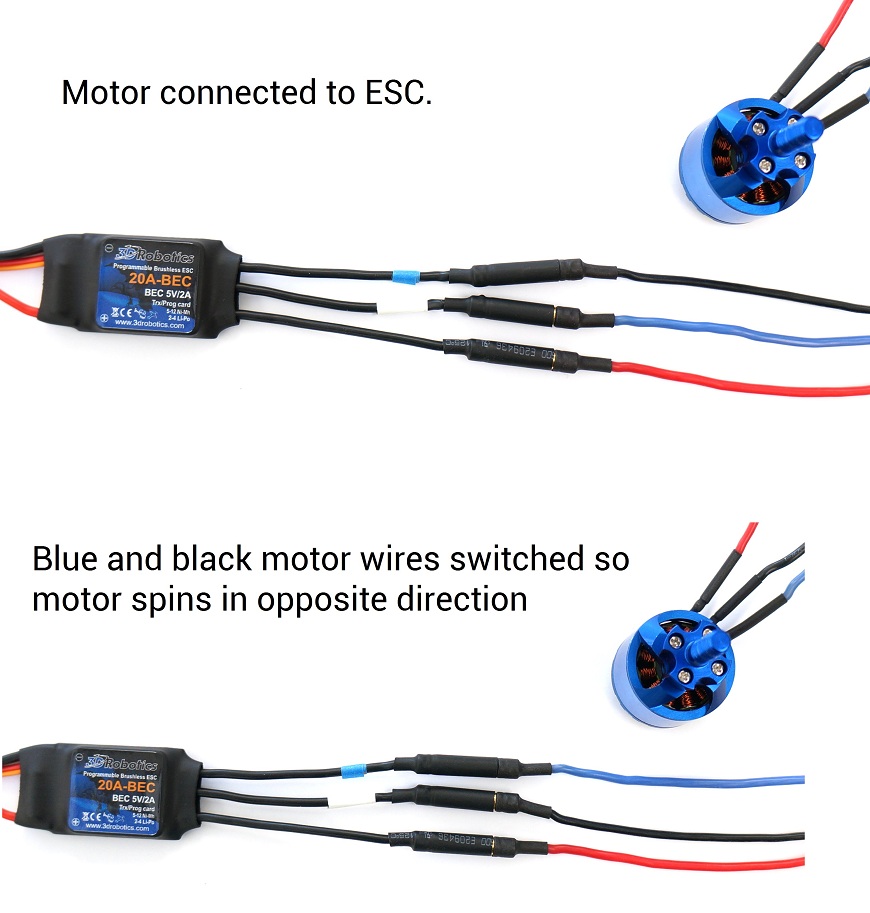
Для изменений направления вращений мотора отсоедените LiPo батарею.
Что бы поменять сторону вращения мотора вам необходимо переключить два из трех кабелей регулятора ESC соединяющие мотор, подключите как показано ниже.
Выбор винтов
- Практика показывает, что в документации каждого мотора есть своя таблица пропеллеров, которые рекомендует производиель, можно следовать этим рекомендациям при выборе пропеллеров.
- Найдите вашу раму квадрокоптера в указанных изображениях. Используйте толкательные пропеллеры в зависимости от нужного вам направления.
- Толкательные пропеллеры, как правило, с пометкой «P» или «SFP» на нем.
- Выберите необходимые пропеллеры на основе направления каждого двигателя.
- Винты бывают разных вариантов и подходят для различных нужд.
Прикрепите винты
- Отвинтите гайки у моторов и соедените пропеллер на моторную цангу с надписями лицом вверх.
- Если у вас соосная конфигурация двигателей, убедитесь, что надпись на пропеллере лицом вверх, даже если двигатель смотрит вниз.
- Установите шайбу сверху пропеллера если это необходимо (зависит от конфигурации крепежа и пропеллеров).
- Затяните гайки для фиксации пропеллеров.
- Зафиксируйте мотор или используйте второй гаечный ключ для более лучшей фиксации пропеллеров.
Более подробную информацию по настройки двигателей (и RC входов) можно найти (Here!) .
Просьба ссылаться на данный ресурс. 2022.
версия 0.75rc
Мы в социальных сетях:
alt=»ArduPilot Mega в Вконтакте» />
15 правил, которым нужно следовать после сборки нового квадрокоптера
Я иногда спешу скорее полетать после сборки нового квадрокоптера. К сожалению, некоторые дроны не взлетали из-за ошибок в конфигурации и настройках. Несколько раз первое включение даже сопровождалось дымком из-за короткого замыкания.
Чтобы больше не наступать на грабли, я составил 15 пунктов-правил того, что нужно сделать первым делом после сборки нового квадрокоптера. Надеюсь, что эти правила помогут вам не спалить свой новый дрон при первом запуске, а также, чтобы первый полет прошел гладко и без проблем.

№1 СНИМАЙТЕ ПРОПЕЛЛЕРЫ при любых работах с квадрокоптером
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
№2 ПРОВЕРЬТЕ ДЛИНУ ВИНТОВ, которыми крепятся двигатели к раме
Перед тем, как прикрепить моторы к раме, измерьте длину винтов. Слишком длинные могут повредить обмотку мотора, что приведет к короткому замыканию, да и просто испортит двигатель.
Сгоревшим мотором дело может не обойтись. Если вы еще не в курсе — карбон (материал, из которого сделана рама) токопроводящий материал, и если винт замкнет на проводку, то сгорит и вся остальная электроника, которая касается рамы.
№3 ИСПОЛЬЗУЙТЕ Smoke Stopper
Это приспособление очень недооценивают, а ведь оно может спасти ваш дрон от дыма, который выйдет из него после короткого замыкания. Смок Стоппер нужен для первого запуска дрона, благодаря ему электричество направится на лампочку, не спалив сам дрон. Будет обидно увидеть белый дымок из дрона, на который вы потратили тысячи рублей (или пару десятков), а он сгорит при первом же запуске.

Подробнее о том, как это работает и для чего, можете почитать здесь (англ. язык): https://oscarliang.com/smoke-stopper/
№4 ПРОВЕРЬТЕ НАПРАВЛЕНИЕ квадрокоптера
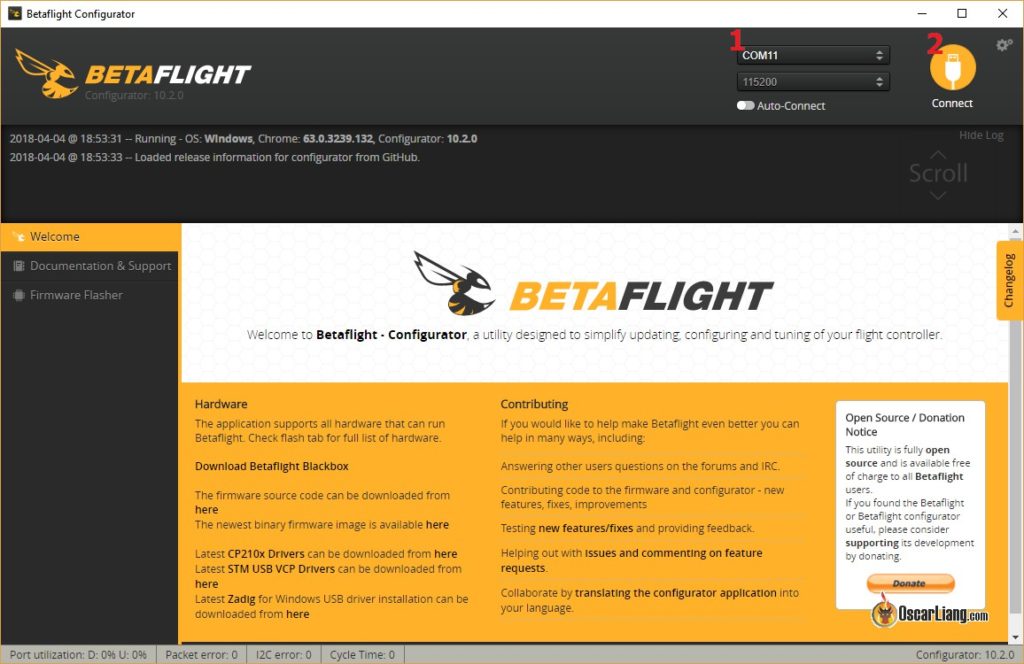
Подключите квадрокоптер к Betaflight Configurator, перейдите во вкладку Setup, там вы увидите 3D-модель дрона. Подвигайте во все стороны дрон (который у вас на столе), он должен полностью повторять ваши движения. Если вы наклонили нос вниз, то моделька тоже должна наклониться стрелкой вниз.
Совет. Если моделька не реагирует на ваши движения, проверьте, включен для акселерометр во вкладке Configuration.
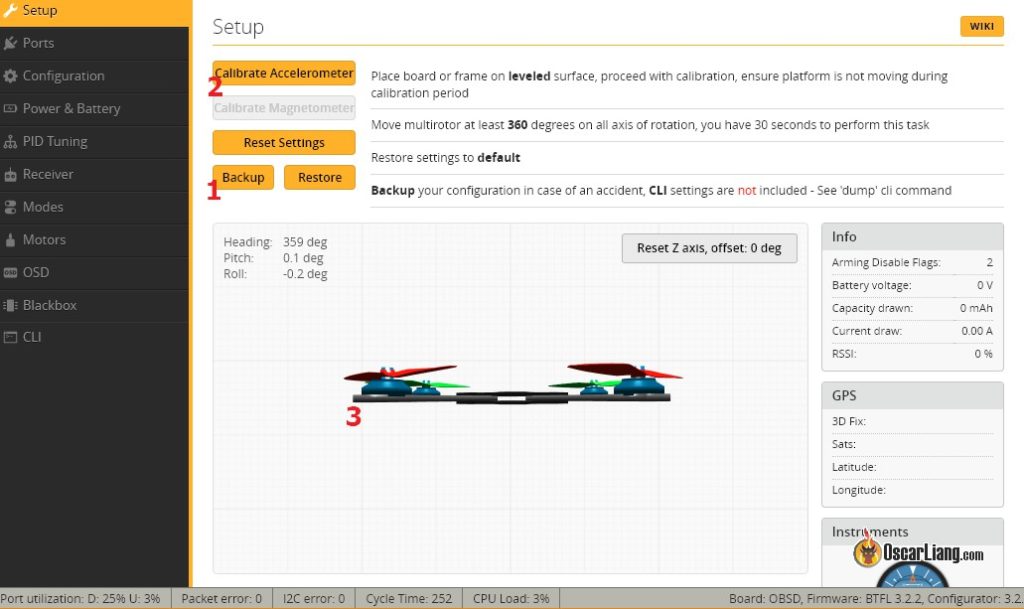
Если вы наклонили дрон носом вниз, а моделька наклонилась вправо, значит, вам нужно внести корректировки во вкладке Configuration, в блоке меню «Board and Sensor Alignment». Как правило, проблемы такого характера бывают с осью вращения. Там нужно будет выставить значение в градусах, например, 170 (число рандомное, все зависит от того, как будет вести себя моделька по отношению к реальному квадрокотперу).
№5 ПРОВЕРЬТЕ МОТОРЫ
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Если мотор крутится не в ту сторону, можно исправить 3 способами:
- поменять местами провода (resource remapping)
- или сделать реверс в BLheli — это самый простой и удобный способ.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
№6 ПРОВЕРЬТЕ ПРИЕМНИК
Подключитесь к бетафлайт и перейдите во вкладку «receiver». Подключите аккумулятор, включите пульт. Проверьте, все ли команды реагируют. Когда вы двигаете стиками и переключателями, цветные полоски тоже должны двигаться.
Если ничего не происходит, убедитесь, включен ли приемник и пульт, правильно ли подключен приемник. Также убедитесь, что во вкладке Конфигурация выбран правильный тип приемника (IBus, SBus и т.д.), а также правильный ли выбран протокол работы (мультишот, дшот и т.д.).
Если полоски двигаются, но не в том порядке, попробуйте поменять карту разметки с AETR1234 на TEAR1234 во вкладке «receiver».
Далее убедитесь, что среднее положение полосок на отметке 1500, а минимальные и максимальные 1000 и 2000 соответственно. Поправить значения можно кнопками на пульте:

или внеся корректировки через CLI, подробнее здесь (в статье это заголовок Receiver).
Неправильные средние значения приведут к тому, что ваш дрон начнет дрейфовать и лететь в разные стороны (смотря какой канал не в середине).
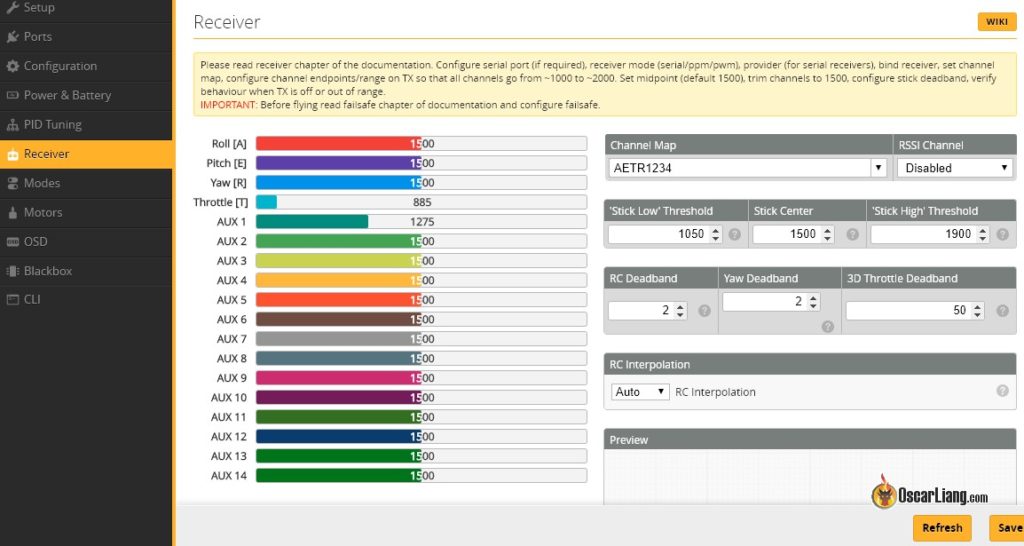
Проверьте, какое число показывает стик газа, когда он в нижнем положении. Число не должно быть выше 1040, в противном случае дрон не получится заармить (запустить двигатели).
№7 Арминг, газ и проблемы с запуском
Попробуйте заармить дрон (запустить двигатели) и дать небольшой газ. Без пропеллеров, конечно же.
Теперь слушайте, как они работают — есть ли посторонний шум, скрежет, вибрации или подергивания. Скорее всего, мотор будет дергаться или вибрировать. Для исправления можно попробовать следующее:
- проблему может исправить монтаж полетного контроллера на мягкие подушки (силиконовые);
- если вы используете режим обновления 32К/32К, попробуйте вернуться на 8К/8К, так как на 32К гироскоп намного чувствительнее;
- попробуйте уменьшить значение фильтра гироскопа «low pass filter frequency» (это фильтр низких частот);
Если проблему не удалось устранить, почитайте эту статью, возможно, она вам поможет.
№8 НАСТРОЙТЕ Failsafe
Failsafe — это одна из главных вещей, которую должен знать каждый новичок в первую очередь. Если вы не настроите Failsafe, то при потере сигнала ваш дрон просто улетит и будет лететь, пока не разрядится аккумулятор. О последствиях, думаю, можно и не говорить, это, как минимум, потеря денег, максимум — он упадет кому-нибудь на голову.
Как настроить Failsafe, можно прочитать здесь.
№9 ОТКАЛИБРУЙТЕ регуляторы оборотов (ESC)
Регуляторы не нужно калибровать, если используется протокол DShot, включая DShot150, DShot300, DShot600, DShot1200 и DShot2400. Но нужно будет калибровать, если у вас PWM, Oneshot125, Oneshot42 и Multishot.
Как откалибровать регуляторы оборотов, читайте здесь.
№10 Настройка Betaflight
Настройка betaflight — это главная часть перед первыми полетами, но там столько настроек, что у новичка может пойти голова кругом.
Но у нас есть специальное руководство для новичков, где собраны все настройки Betaflight на русском языке.
№11 ПРОВЕРКА FPV системы
Перед первым полетом убедитесь, что FPV система корректно работает: камера fpv снимает и направляет видео в видеопередатчик, а он в свою очередь отправляет сигнал в ваш шлем или очки. Проверьте, совпадают ли каналы на видеопередатчике и шлеме/очках, качественная ли картинка.
Если у вас есть OSD, то его можно настроить под свои нужды, статья как настроить OSD Betaflight.
№12 НЕ ВКЛЮЧАЙТЕ видеопередатчик без антенны
VTX (видеопередатчик) всегда достаточно сильно греется и это нормально, но он может перегреться и сгореть, если вы его включите без антенны. Точнее не может, а точно сгорит без антенны. Не забывайте сначала устанавливать антенну, затем включать сам квадрокоптер.

№13 ПРОВЕРЬТЕ, правильно ли вы установили пропеллеры на моторы
У квадрокоптера 4 мотора, 2 (CW) вращается по часовой стрелке и 2 против часовой стрелки (CCW). Не перепутайте пропеллеры при установке, на них тоже есть маркировка, также обычно маркировку направления вращения наносят и на сами двигатели. Если установить пропеллеры в неправильном направлении, при попытке взлета квадрокоптер перевернется. Правильная установка:

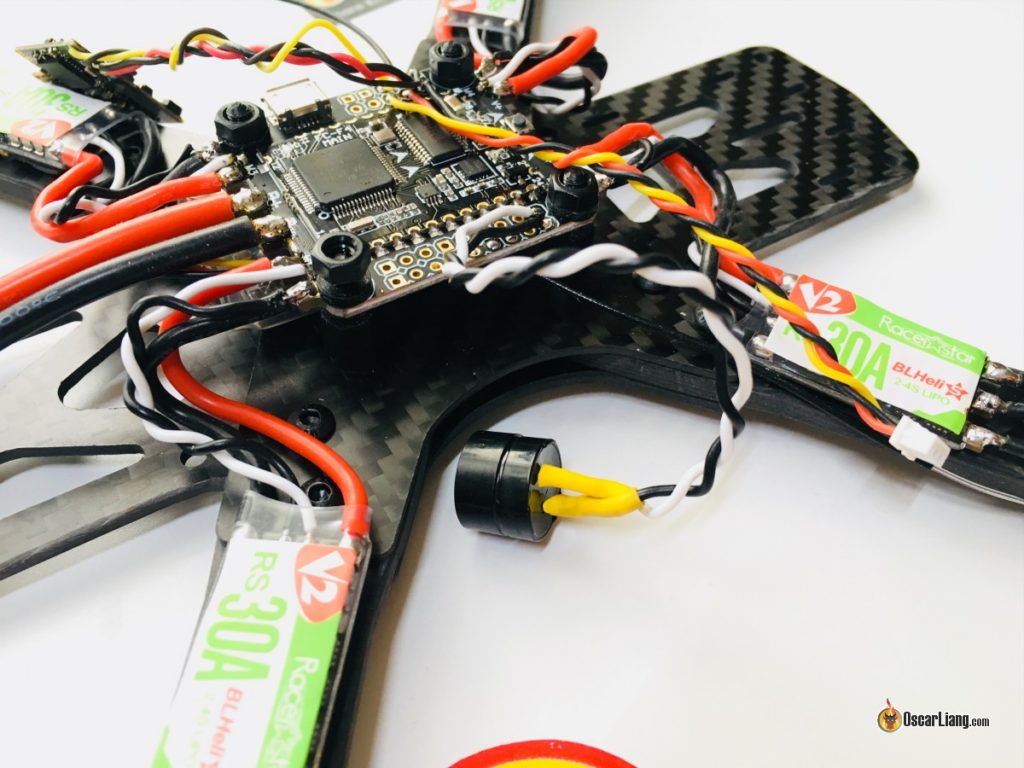
№14 УСТАНОВИТЕ пищалку (buzzer)
Просто необходимая вещь для гоночного квадрокоптера (да и для съемочного тоже), используется в основном для поиска после падения, своим сильным писком поможет найти дрон даже в густой траве. Также пищалка может издавать сигналы при неисправностях, готовности к взлету, низком заряде аккумулятора и так далее.
№15 ТРЕНИРУЙТЕСЬ в симуляторах
Перед своим первым полетом вам просто необходимо сначала потренироваться в симуляторе, это позволит получить вам первые и необходимые навыки полета и, скорее всего, вы не разобьете дрон в первые секунды. Достаточно полетать в симуляторе часа 4 и уже можно будет пробовать летать на реальном квадрокоптере. Симуляторов очень много, большинство платные, но уже есть и бесплатные.
Пропеллеры для квадрокоптера — основные параметры и как подобрать
Если ты собрался собирать свой квадрокоптер, то тебе нужно в первую очередь знать о том, как заставить «это» взлететь. Здесь есть два важных параметра – пропеллеры, и двигатели. Пропеллеры для квадрокоптера могут быть самыми разными, и каждый несёт в себе совой смысл. Сегодня я объясню тебе основные понятия и принципы, чтобы ты знал, как подобрать пропеллеры для своей модели. Располагайся, заваривай пельмешки, будет долго, и немного больно. Но тебе понравится.
Сразу оговорюсь, что в любом проектировании бывает достаточно много НО. Всё, что я скажу далее, это стартовые знания. Не бойся включать голову и задавать вопросы. Нет такой информации, которую нельзя найти в гугле, или спросить на форуме. Главное- умение ей пользоваться. Поехали!
Основные понятия

- «В идеальном мире» — чисто теоретическое понятие, не берущее в расчёт побочные факторы
- Параметр «длинна», это и есть длинна пропеллера. Если точнее, то диаметр окружности, описываемой лопастями
- Параметр «шаг» можно сравнить с шагом резьбы. Это то расстояние, которое может пройти винт за один оборот (по аналогии с шурупом в дереве) . Чем больше угол атаки лопасти, тем больше это расстояние.
«Угол атаки», это Угол наклона лопасти, относительно горизонтальной плоскости - «Тяга», это сила, которая создаётся винтом. Она компенсируется остальными силами реакции (сопротивление воздуха, гравитация). Из этого следует, что пока тяга больше сопротивления – коптер будет разгоняться в направлении, противоположном вектору тяги.
Основные параметры
Количество

Количество лопастей винта влияет на подъёмную силу, стабильность и отзывчивость коптера (в идеальном мире). Чем больше лопостей, тем эти параметры лучше. На самом деле, многолопастные пропеллеры (2+) ставятся только на мелкие дроны. Это происходит из за дороговизны изготовления и сложности балансировки. В большом размере отбалансировать 4 лопасти очень дорого.
Чем их больше, тем стабильнее БПЛА. Малое количество негативно сказывается на управляемости.
Виды лопастей
- Normal (N) – Имеют заострённые на концах лезвия. Это уменьшает тягу, но и снижает расход энергии аккумулятора
- Bullnose (BN) – Бычий нос (Закруглённые). При равном с нормальными диаметре, имеют большую тягу и площадь. За счёт тяжести ведут себя более стабильно, и увеличивают отзывчивость дрона по рысканью. Сильно повышают расход энергии акб.
- Hybrid Bullnose (HBN) – промежуточный вариант. Имеют как и преимущества, так и недостатки предыдущих.
Направление вращения

Для электродвигателей есть два направления вращения. CW – вращение вала по часовой стрелке, CCW – вращение вала против часовой стрелки. Направления нужно или чередовать (так как каждый пропеллер создаёт реакционную силу, которая стремится развернуть то, к чему он прикреплён, в направлении вращения), или размещать соосно на одном луче (тогда реакционная сила одного компенсирует оную у второго. Это более сложная компоновка. Используется, к примеру, на вертолёте «чёрная акула»).
На направление вращения самого пропеллера указывает поднятая кромка. Она смотрит в сторону вращения.
Материал
Пластик – наиболее популярный, но не самый удачный вариант. Пластиковые пропеллеры обладают низкой ценой и очень широки ассортиментом. Обладают разной, но в основном высокой гибкостью и мягкостью. Якобы это увеличивает их устойчивость к механическим повреждениям. На самом деле, любой, даже небольшой дефект лопасти, скорее всего, будет фатален. Там уже не важно, расколется она, или просто помнётся. Всё равно ты её меняешь.

Углеродное волокно – Очень дорого, но очень круто. Великолепная жёсткость, лёгкость. Легко сбалансировать. Это значит, что брака будет меньше. Не теряет форму. Да и наличие чёрных лопастей всегда радует глаз. К ним рекомендуется докупить защиту лопастей для квадрокоптера, ибо их очень легко расколоть.
Композит – внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость (почти) как у карбоновых пропеллеров. Также не очень высокая цена.
От веса зависит отзывчивость дрона по оси рысканья. Однако, с этим надо быть аккуратным, ибо также увеличивается нагрузка на мотор квадрокоптера.
Эластичность
Эластичность пропеллера улучшает устойчивость оного к перегрузкам и механическому воздействию (не путать с мягкостью).
Качество

Как правило, чем дороже, тем качественнее. Тут может быть много параметров. Основной, это балансировка. Качественный пропеллер балансировать не придётся. Так же важным моментом является качество материала.
Пластик может быть упругим и эластичным, а может быть мягким и НЕ эластичным. С этим нужно быть внимательным. Не смотря на кажущуюся простоту, от качества лопастей напрямую зависят лётные качества коптера.
Спецификация
Есть два типа обозначений.
- L- длинна
- P- шаг
- B- количество лопастей (для двух лопастей может не указываться)
Например, 5045×3 – длина 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда приходится гадать. Тот же пропеллер может обозначаться 0545×3.
Например, 5×45х3 – длина 5 дюймов, шаг 4.5 дюйма, 3 лопасти.
Иногда в конце присутствует буква R или C. Она определяет направление вращения пропеллера.
- R – по часовой стрелке
- C – против часовой стрелки
Иногда в конце присутствует обозначение профиля лопасти. (подробнее смотри выше «виды лопастей»)
- N – нормальная (заострённая)
- BN – закруглённая
- HBN – промежуточная
Методы крепления и крепежи

Пропсейвер – Хороший вариант для проведения экспериментов, когда надо часто снимать и надевать пропеллер. Выглядит как втулка, которая притягивается к валу двигателя двумя винтами. Сам пропеллер надевается сверху, и притягивается резинками к выступающим винтам. Далеко не полетит, но можно побаловаться.
Цанговое крепление – рабочий вариант. На вал насаживается цанга (та, что с прорезями), потом зажимная втулка, пропеллер и шайба. Крепление надёжное и идеальное для полётов.
Outranner – Это не крепление, это разновидность бесколлекторного мотора, в котором ротор (вращающаяся часть) находится снаружи. На их верхней поверхности обычно находится несколько резьбовых отверстий, в которые крепится переходник (коих несметное количество).
Балансировка
Когда ты сэкономишь на пропеллере, ты точно удивишься тому, что он не отбалансирован. Из-за этого он будет вибрировать, на камере коптера ты будешь наблюдать эффект «желе», резьбовые соединения будут ослабевать, а моторы будут изнашиваться очень быстро. Надо балансировать.

Для этого тебе понадобится:
- Пропеллер
- Скотч\супер клей (на свой страх и риск)
- Мелкозернистая наждачная бумага
- Специальный инструмент — балансировщик пропеллеров
- Уровень
- Балансировщик устанавливаешь строго горизонтально.
- Устанавливаешь пропеллер на ось, в горизонтальное положение. Отпускаешь. Одна из лопастей падает вниз.
- Берёшь наждачку, и с внутренней стороны поднявшейся лопасти (с вогнутой) снимаешь немного материала. Не переусердствуй.
- Возвращаешь лопасти в горизонтальное положение. Если одна из них падает – повторяешь предыдущий пункт. Если нет- идём дальше
- Так как балансировщик тоже не лучшего качества- переворачиваешь ось и смотришь по новой. Нужно поймать момент, когда вне зависимости от направления оси, пропеллер будет сбалансирован.
- Молодец.
- Но не совсем. Теперь ступица. Устанавливаешь пропеллер вертикально. Если пропеллер наклоняется вправо- делаешь мазок лаком на левой стороне.
- Добиваешься баланса
- Меняешь направление горизонтальной оси пропеллера. Если всё по-прежнему в порядке- ты отбалансировал пропеллер. Надеюсь у тебя не октокоптер.
- Молодец!
Калькулятор Ecalc
Крайне удобный калькулятор, которые находится на официальном сайте Ecalc. В нём ты сможешь задать те запчасти, которые будешь использовать для своего проекта, а он выдаст тебе (очень) примерную модель поведения коптера.

Давай рассмотрим его поближе, так как он тебе точно пригодится.
Основное
- Тут ты выставляешь основные параметры своей сборки
- Полный вес модели можно указывать «без ВМГ» (винтомоторная группа = пропеллеры и моторы). При выборе пропеллеров и моторов калькулятор сам учтёт их вес
- Количество винтов – соосные винты, это два винта расположенных друг над другом, а одноосные это один винт на одном луче коптера. Для простоты, в нижнем правом углу, калькулятор рисует тебе конфигурацию
- Размеры рамы- По диагонали, от одного конца луча, до другого
- На остальное пока можешь забить. Оно уже стоит по стандарту. Высота, температура и давление может пригодится для расчёта полётных характеристик для разных высот
Аккумулятор
- Из списка выбираешь нужный, или максимально похожий аккумулятор, и состояние заряда «номинал»
- В поле «P» пишешь количество параллельно соединенных аккумуляторов (если нужно)
Регулятор
- Из списка выбираешь свой регулятор скорости
- В навесном оборудовании пишешь суммарное потребление и вес всей той фигни, что ты хочешь повесить на свой дрон. Камера, диоды, сервоприводы, мелкокалиберные орудия. Если ты уже указал их вес в основном весе модели, то поле вес оставляешь с нулём
Мотор
Выбираешь производителя мотора из списка, и проверяешь по параметрам. Если похоже, то всё нормально, если нет, то продолжаешь «Охлаждение»
Пропеллер
- Выбираешь тип пропеллера из списка. Угол кручения (угол атаки), диаметр винта и его шаг ты узнаешь из спецификации
- Передаточное число используешь, если твой пропеллер присоединён к мотору через редуктор
Всё, можно нажимать «рассчитать», и наслаждаться результатами с 15% погрешностью. Я не зря сказал о погрешности. Все эти расчёты годятся только для того, чтоб прикинуть – полетит, или нет. Более точной информации ты не получишь.
Если в списках нет нужной позиции, то можно воспользоваться строкой Custom, и ввести всё самостоятельно.
RashVinta
Программа для расчёта параметров пропеллера для летательного аппарата.

Она может работать с тремя наборами исходных данных.
- Мощность двигателя + диаметр винта, который вам нужен
- Мощность двигателя + частота вращения
- Диаметр винта + шаг
В первом варианте
- Галочку на «расчёт по диаметру винта»
- Вводите нужный диаметр в см
- Вводите мощность двигателя в лошадиных силах, подсмотренную в параметрах двигателя (чтоб получить лошадей из кВт используй формулу кВт*1.36)
- Вводи максимальную скорость, которую позволит развить твой винт
- Введи среднюю скорость в поле «Скорость расчётная»
- Нажми кнопку расчёт
В результате ты увидишь необходимый шаг винта и частоту вращения.
Во втором варианте
- Убери все галочки
- Введи мощность двигателя
- Введи частоту вращения винта (двигателя, если нет редуктора)
- Введи максимальную и среднюю скорости
На выходе ты получаешь диаметр винта в сантиметрах и шаг винта.
Третий вариант
- Установи галочку в «указать параметры винта»
- Введи диаметр винта и шаг винта
- После нажатия на кнопку расчёт, программа рассчитает профили сечения винта (форма лопастей) на различных радиусах от центра. Результат ты получишь в окне просмотра, и в виде таблицы Date.html в каталоге программы.
- Кнопками со стрелками просматриваешь сечения на различных радиусах, а ползунком меняешь масштаб.
Как ты можешь заметить, подбор и корректировка пропеллеров, это важное и не самое простое занятие. Однако, настоятельно рекомендую уделить этому время. Даже в такой, на первый взгляд, неуклюжей корове, как квадрокоптер, есть место аэродинамике. К тому же это может сэкономить тебе очень много денег на моторах.
Конечно, всё вышесказанное достаточно ситуативно. К примеру, если ты собираешь маленький дрон, или просто хочешь попробовать, то пропеллеры можно использовать и самые дешёвые, и не отбалансированные.
Это вряд ли помешает твоему дрону взлететь, да и ты сразу поймёшь, что не так, и на что нужно впредь обращать больше внимания.
Так же крайне не рекомендую начинать с соосной компоновки, если ты не знаком с миром беспилотной авиации. Там есть куча нюансов, которые базируются на более глубоком понимании темы. Идеальным вариантом для начала будет четырёх лучевая, квадратная компоновка.
Ну и нужно понимать, что если ты не крутой инженер, с богатым набором закрытых САПР программ, то всё, что ты можешь рассчитать – мало тебе поможет.
Все эти вычислительные решения дают крайне ориентировочный результат. Так что я рекомендую тебе побольше экспериментировать, хотя помощью софта пренебрегать тоже не стоит. Пробуй, учи матчасть, когда-нибудь получится очень круто!
Уф… Я старался, клавиатуру до стола стёр, выпил ведро кофе. За это ты можешь наградить меня, и поделиться этой статьёй, при помощи кнопок внизу. А если хочешь почаще узнавать что-то новое и полезное, то подписывайся на нас в социальных сетях. Удачи, пилот!