Мультикоптеры: от расчетов к полётам. Всё, что нужно знать, чтобы собрать себе квадрокоптер\гексакоптер\октакоптер!

Всем привет! После выхода первого же ролика, снятого с собранного мной гексакоптера, народ стал одолевать вопросами и просьбами помочь в постройке аппарата.
В наше время нет дефицита информации, напротив, есть её переизбыток, который очень сложно фильтровать.

Хочу в своей статье ответить на те вопросы, которые поступают практически каждый день от моих знакомых.
А именно:
— Какой коптер лучше и чем они отличаются? (квадро-, три-, гекса-, октакоптер)
— Купить готовый, или собрать самому?
— Какие комплектующие подобрать? Как рассчитывать? Каков минимальный набор для полёта?
— На что снимать – на GoPro или камеру потяжелее?
Думаю, что для начала этих вопросов хватит, чтобы заставить закипеть мозг тех, в чьих головах пока есть только желание разобраться с основами, но нет опыта за плечами.
Прошу не принимать всё написанное за единственно верную истину. Как раз хочу объяснить, что я человек с творческо-техническим складом ума, но не живу в своем ограниченном мире коптеростроения. Напротив, я новичок в этом вопросе и пишу статью потому, что загоревшись желанием построить дрона для аэросъемки, столкнулся с тем, что очень много разных мнений и выбрать верный путь очень сложно. Мой первый опыт был не совсем удачным, от этого и хочу всех уберечь, выделив самое важное и акцентируя внимание на важные детали, о которых мало говорят.
Итак, чем же отличаются коптеры и откуда такие названия? Квадрокоптер – это четырехвинтовой аппарат. Этот тип БПЛА (беспилотных летательных аппаратов) на сегодняшний день является самым распространенным и уже фактически стал именем нарицательным для народа, если речь идет о мультироторных системах. Самый известный четырехмоторный дрон выпустила компания DJI, практически все о нем слышали. Это тот самый Phantom. Но разбирать все модификации бессмысленно. Единственное, я надеюсь, что после прочтения этой статьи вы сами сможете просчитать параметры и понять, почему полетное время между первым и вторым поколениями Phantom’ов изменилось почти вдвое.
Гексакоптер — это шестимоторный, а октакоптер, соответственно, восьмимоторный аппарат. Есть еще трикоптеры и так называемые соосные. И тут много споров на тему, как правильно назвать аппарат с 8-мью моторами, но 4-мя лучами, соосный квадрокоптер или всё-таки октакоптер. Моторы располагаются на одной оси один над другим. У такого расположения есть одно преимущество — размеры. Но на практике те же 8 моторов на октакоптере будут давать более высокий КПД, чем установка на одной оси парных двигателей.
Как вы понимаете, вся разница в количестве винтов, сказывается в первую очередь на подъемной силе и стабильности аппарата. То есть логично, что при всех равных условиях маленькому квадрокоптеру будет сопротивляться с ветром намного сложнее, чем большому октакоптеру. Во-первых, больший вес сложнее сдвинуть с места, во-вторых, большая длина рычага (луча рамы, на конце которой установлен мотор с пропеллером) говорит о том, что один и тот же порыв ветра способен накренить аппарат большего размера на меньший угол относительно горизонта. Следовательно, многомоторные системы более устойчивы к худшим погодным условиям.
Хочу коснуться еще одной темы — основ понимания физики поведения мультикоптеров. Эти аппараты управляются легче, чем любые другие летающие модели: самолёты, вертолёты, планеры и т.д. Для полётов коптера необходимо минимум 4 канала аппаратуры управления.
1 канал — Элероны (aileron) — это канал, который отвечает за направление влево-вправо.
2 канал — Элеватор (elevator) — это канал, отвечающий за движение вперед-назад.
3 канал — Газ (throttle) — это канал газа. Отвечает за набор и снижение высоты.
4 канал — Рысканье (rudder) – отвечает за вращение вокруг своей оси.
Остальные каналы в аппаратуре (моделисты любят использовать слово «аппа»- это тот самый пульт-передатчик в руках «пилота» и приемник на борту аппарата) используются для управления осями подвеса камеры, для складывания шасси, надстройки уровня чувствительности аппарата к внешним условиям (PID параметры в полётном контроллере, отвечающие за силу и скорость реакции коптера на сигналы управления, сопротивление погодным условиям), для переключения режимов полёта (к примеру GPS, Attitude, Manual, Failsafe, Home lock, Course Lock). Как говорят опытные авиамоделисты, много каналов не бывает, поэтому у них есть одно важное правило – покупать сразу хорошую надёжную аппу известных брендов. Лучшими считаются производители: Futaba, Spectrum, JR.

Время летит, поэтому добавляю в статьи свежие строки, актуальные на сегодняшний день, спустя несколько лет после написания статьи. Буду помечать их курсивом и добавлять ссылки на примеры комплектующих в проверенных магзинах, в которых сам совершал покупки.
Из бюджетных, но проверенных временем аппаратур управления пользуется популярностью FRSky Taranis Q X7. И старший брат — FrSky Taranis X9D Plus
Одна и та же хорошая аппаратура способна хранить в себе настройки одновременно десятков моделей. То есть, однажды приобретая её, можно пользоваться ею фактически всю жизнь и управлять RC самолётами, вертолётами, машинами, мультикоптерами, просто выбирая в меню аппаратуры нужную модель (но закладывать настройки каждой модели нужно самому вручную). Так вот, для чего же на практике люди используют дополнительные каналы? Если вы планируете заниматься аэросъемкой, то минимум 2 канала нужно на управление трех-осевым подвесом – канал YAW отвечает за рысканье (поворот вокруг своей вертикальной оси, горизонтальное панорамирование), PITCH – канал тангажа, то есть наклон камеры вверх\вниз. Как правило наклон оси ROLL (горизонта) регулировать не нужно, так как сложно придумать ситуацию, когда на видео нужно нарочно завалить горизонт. Иногда люди используют дополнительную курсовую камеру на сервоприводах, которой вообще можно управлять движениями головы. Лично я реализовал такое управление своим подвесом с камерой GoPro, которая одновременно является и курсовой и основной камерой. Для этого устанавливается датчик head tracker в видео очки или FPV-шлем (First person view – вид от первого лица), который соединяется с аппаратурой управления, а та в свою очередь передает сигналы на каналы управления нужных осей подвеса камеры. Для дополнительных каналов управления также можно придумать другие предназначения: от сброса транспортируемых коптером предметов до поджигания фитиля установленных на него ракетниц-фейерверков, тут всё ограничивается лишь полётом фантазии.
_
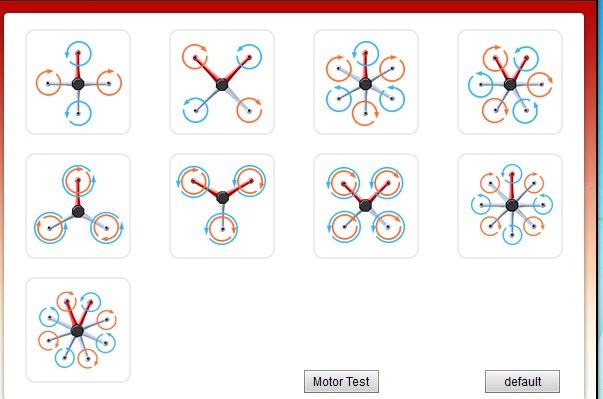
Еще важно разобраться с тем, как мультикоптер работает в целом. Понятно, что при движении стика газа вверх на аппаратуре управления, коптер просто прибавляет обороты на всех двигателях и происходит набор высоты. Чтобы полететь вбок, аппарат кренится в нужную сторону, увеличивая обороты двигателей с одной стороны и снижая с другой. При этом, за счет датчиков, соединенных с ПК (полётным контроллером), аппарат кренится только до ограниченного в прошивке контроллера угла, чтобы не перевернуться. Вперед и назад летает, соответственно, тем же принципом. А вот вращение вокруг своей оси происходит за счет того, что двигатели через один крутятся в противоположные стороны и пропеллеры должны быть соответствующие — одни загребают воздух под себя, вращаясь по часовой стрелке, другие — против. Получается, чтобы аппарат развернулся в нужную нам сторону, он увеличивает обороты двигателей вращающихся в одну сторону и ровно настолько же уменьшает обороты двигателей, вращающихся в противоположную.
_
Что касается «начинки», то мультикоптер состоит из рамы, на которую устанавливаются двигатели. Сигналы на вращение двигателей идут из полётного контроллера (ПК), но мощности этих сигналов не достаточно, поэтому перед каждым двигателем стоит регулятор оборотов (в простонародье «регуль», ESC).
Также на борту стоит приемник сигналов управления, который передает их в ПК.

Современные полётные контроллеры такие, как распространенный DJI Naza-m v2 представляют собой целые наборы.

Контроллер уже включает в себя виброразвязку, поэтому его не нужно ставить на демпферную площадку, а нужно крепить прямо на корпус. Также у него на борту находится гироскопический, барометрический датчики, магнитометр, компас и дополнительно подключается модуль GPS, чтобы аппарат мог вернуться на точку взлета сам, если потеряет связь с аппаратурой управления, но это не единственная функция. К данному полётному контроллеру в комплекте идет модуль PMU и LED, а также может подключаться модуль bluetooth и OSD телеметрия. Также на борту стоит батарея, питающая всю систему и может стоять дополнительная батарея для приемника аппаратуры управления. Данный полётный контроллер установлен в современных квадрокоптерах DJI Phantom 2, но его возможности намного шире рамок этого небольшого аппарата.
Выше перечислен минимальный набор, который можно назвать мультикоптером. Он может взлететь, если имеется «аппа», но этого не достаточно для съемок. Пишу это к тому, что многие, узнав бюджет на весь мой аппарат с камерой и дополнительным оборудованием, удивляются и спрашивают, почему я не купил за эту сумму готовый более серьезный аппарат. Ответ в том, что дополнительное оборудование для управления, съемки, стабилизации и контроля стоит намного больше, чем сам мультикоптер.
И всё-таки, собрать самому, или купить готовый? На этот вопрос вы ответите сами себе, прочитав всю статью и осознав все за и против. Многие, как я уже написал, критикуют меня в том, что я потратил большую сумму на сборку аппарата, который фактически умеет то же самое, что DJI Phantom 2. Сумма со всеми допами подбирается к 200 тысячам рублей. Но сюда входит и стоимость аппаратуры управления Futaba 10J с заводским режимом мультикоптеров, в паре с родным передатчиком работающей до 4 км и имеющей очень надежную помехоустойчивость. Сюда же вошла и камера GoPro 4 black, подвес Fy-G3, очень мощный FPV-передатчик и приемник на 1000 мВатт 1,2 Ггц с изготовленными под заказ клеверными антеннами, покрывающими расстояние до 12 км и фильтром, чтобы срезать частоты, наиболее влияющие на аппаратуру управления, чтобы не забить ненароком сигнал приемника. Также в этой сумме FPV-видеошлем eYebox с потрясающей цветопередачей, детализацией и углом обзора (а до него были очки Fatshark BASE SD, которые мне не понравились в сравнении со шлемом и я решил их продать).
Говоря о вопросе покупки готового собранного аппарата – можно однозначно ответить – покупайте проверенные, если Вы планируете использовать их только для того, для чего они созданы. То есть если Phantom 2 создан, чтобы поднимать GoPro, вы не повесите на него зеркалку, вы не увеличите время его полёта, из него выжат максимум очень грамотными специалистами.
Собирать коптер самостоятельно – это выбор тех, кому нравится решать сложные задачи. То есть для людей, которые получают удовольствие от самого процесса расчетов и сборки. Преимущества собранного своими руками аппарата в том, что он подлежит апгрейду, на него можно вешать любое дополнительное оборудование. Но важно понимать, что аппарат изначально рассчитывается под определенный полётный вес, время полёта. А вот, так сказать, запас тяги может привести к плачевным последствиям.
Конфигурация моего нынешнего гексакоптера такова:
1. Рама: Tarot fy-680.
2. Контроллер: dji naza-m v2 c gps.
3. Моторы: sunnysky v3508 kv580
4. Регуляторы: Hobbywing Platinum PRO 30A OPTO ESC(2-6s).
5. Пропеллеры: карбон 1255.
6. Батареи: lipo 4S turnigy 5000 mah 30-45C и 8000 mah 20-30 C (вес 500 и 800 грамм).
7. Аппаратура управления и приемник: Futaba 10J.
8. Подвес для gopro3 : Feiyu Tech fy G3 gimbal.
9. OSD телеметрия DJI iOSD mini.
10. BAC трансформатор с выводом на 5V для подпитывания камеры во время полёта.
Снаряженный вес без батареи 2600 грамм.
Изначально была немного иная конфигурация. Аппарат летал на батареях 3S, двигателях sunnysky 2216 kv800 и пропеллерах 1045 и 1238 (но на 1238, которые прислал продавец по ошибке, аппарат разбился).
Если вы всё-таки решились собирать мультикоптер самостоятельно, попробую объяснить основные принципы. Важно сразу понять, какой снаряженный вес будет в итоге у аппарата и вести расчеты, отталкиваясь от него. Можно найти готовые конфигурации на форумах и перепроверить их на специальном калькуляторе, о котором я расскажу далее. Важен также такой момент, что этот калькулятор не знает, возможно ли физически установить пропеллеры расчетного размера на вашу раму и можно ли их вообще ставить на заданные двигатели.
1. Поэтому первым делом определяемся с рамой, узнаем её вес, максимальный размер пропеллеров, которые возможно установить.
2. Подбирая моторы, сразу смотрим на сайте производителя таблицы характеристик с рекомендуемыми пропеллерами. К примеру я использую моторы SunnySky v3508 kv580
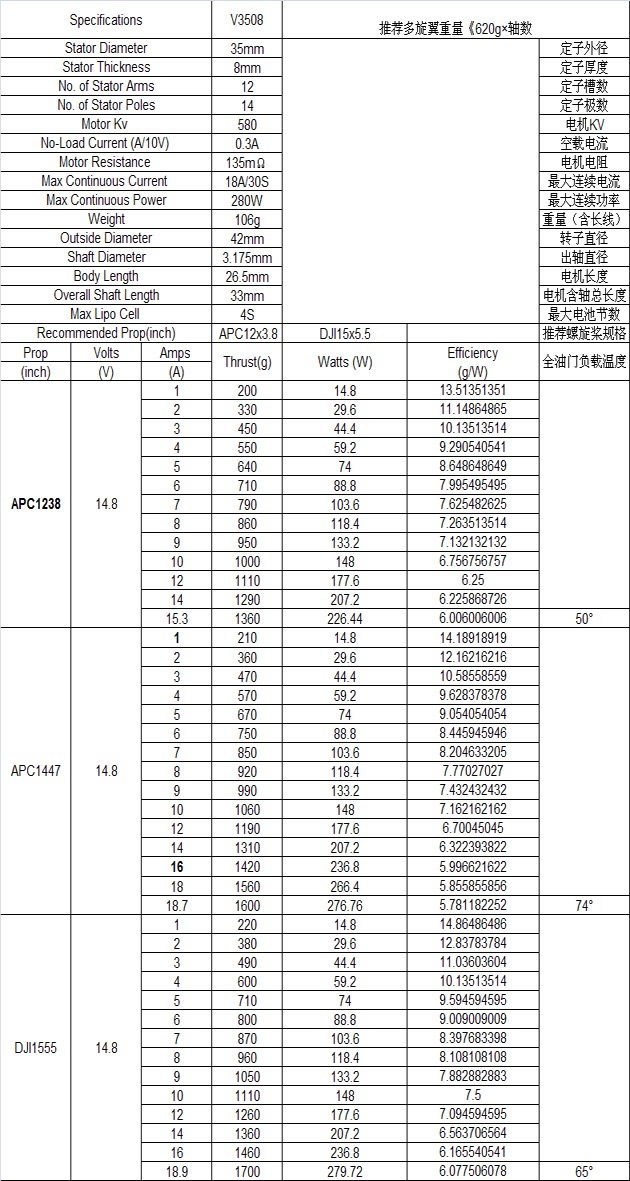
И тут хочу акцентировать внимание на параметры мотора. В названии мотора зашифрованы его основные параметры V3508 kv580, где v — это серия, 35мм — диаметр статора, 8 мм — это длина статора. А параметр KV говорит об оптимальных для данного мотора оборотах висения летательного аппарата. То есть, имея оптимальные обороты висения и вес аппарата, нам придется под них подбирать пропеллеры с нужными параметрами, чтобы добиться оптимальных показателей. В таблице видно, что для данных моторов производителем рекомендуются 3 вида пропеллеров: 1238, 1447 и 1555. Во втором столбце видим, что везде значение напряжения стоит 14.8 вольт. То есть данные моторы используются только с 4S батареями. Для одних и тех же моторов в таблице могут даваться показания для разного вольтажа, и нужно быть очень внимательным, ведь моторы, которые работают и с 11.1 вольтовыми 3S батареями и с 14.8 вольтовыми 4S батареями, как правило, допускают максимальный размер пропеллеров при 3S батареях меньше, чем при 4S, так как мотору может просто не хватить мощности раскручивать тяжелые для него пропеллеры, и есть вероятность перевернуть коптер вверх ногами прямо в полёте. (Со мной такое случалось). Вот пример таблицы для моторов SunnySky 2216 kv800
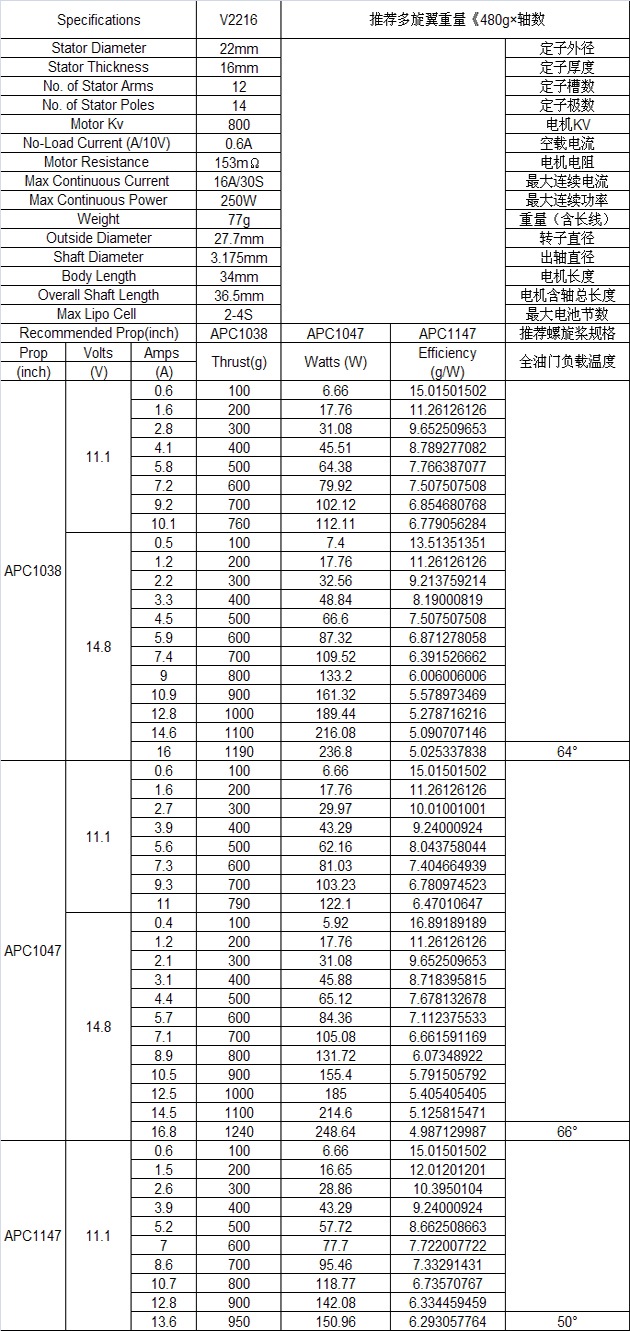
Из этой таблицы видно, что с моторами 2216 при использовании 11.1 вольтовых батарей можно ставить пропеллеры максимального размера 1147, а при 14.8 вольтовых максимум 1047-е пропеллеры. Теперь, чтобы сложить картину воедино, следует пояснить маркировку пропеллеров. На самом деле, размер обозначает только первое двузначное число, а второе означает шаг. Размеры даются в дюймах. Маркировка 1047 означает, что пропеллеры 10-тидюймовые, а шаг на один оборот составляет 4,7 дюйма.
Выше я уже привел ссылку на видео случая из моей первой конфигурации, когда я на моторы 2216 kv800 установил пропеллеры 1238. На видео с 17й секунды видно, что при снижении, либо порыве ветра аппарат начинает амплитудно раскачиваться. Закончилось это тем, что коптер перевернулся в воздухе и приземлился вверх ногами на асфальт. Во-первых, моторы перегреваются и могут вообще перегореть в полёте, во-вторых, у них банально не хватает силы резко раскручивать нужные пропеллеры для стабилизации положения коптера, в итоге аппарат себя раскачивает все сильнее и сильнее.
Также, прежде чем перейти к этапу расчетов, важно пополнить свои знания информацией о литий-полимерных батареях. Они встречаются сейчас повсеместно — в телефонах, планшетных компьютерах, ноутбуках и других устройствах. Эти батареи имеют максимальную ёмкость относительно веса и максимальную токоотдачу, минимальное время заряда. Но при этом батареи токсичны и даже взрывоопасны.
Они непременно взрываются при сильном механическом повреждении, при чрезмерном перезаряде, при замыкании. Эту информацию важно знать и тем, кто не планирует собирать себе коптер.
Li-Po батареи нужно заряжать, транспортировать и хранить в специальных огнеупорных конвертах.

Теперь давайте разберем параметры в описании батареи.

К примеру :
ONBO 5200mAh 4S 45C Lipo Pack:
• Емкость: 5200mAh
• Напряжение: 4S1P / 4 Cell / 14.8V
• Ток разряда: 45C продолжительный / 90C пиковый
• Вес: 485г (включая провода, разъемы и корпус)
• Размеры: 160x50x32мм
• Балансировочный разъем: JST-XH
• Силовой разъем: T-connector
Что же означают эти 2S, 3S, 4S? 6S и на что они влияют?
Параметр S означает количество ячеек, либо банок. Каждая ячейка представляет собой отдельную батарею указанной ёмкости, но её номинальное напряжение 3.7 вольта, а напряжение полностью заряженной ячейки составляет 4.2 вольта. Поэтому номинальное и полное напряжение 2S аккумулятора составляет 7,4-8,4 вольта, 3S – 11,1-12,6 вольт, 4S – 14,8-16,8 вольт и т. д.
У аккумулятора имеется балансировочный разъем, к которому можно подключить индикатор напряженияи следить как за общим уровнем заряда батареи, так и за уровнем заряда в каждой ячейке.

Подобный индикатор настраивается на определенный уровень напряжения, по достижении которого на любой из ячеек он начинает сигнализировать громким писком. Это очень удобно, если отправлять аппарат в полёт с подключенным устройством, которое настроено на 3,4 вольта. Чтобы знать, что пора приземлять коптер. Ведь важно знать, что порог, до которого можно разряжать Li-Po аккумулятор, чтобы он прослужил долгое время, составляет 3.3 вольта на банку. При полной разрядке аккумулятора, он теряет значительную часть своей ёмкости.
А для правильной его зарядки требуется специальное зарядное устройство, которое умеет балансировать ячейки до равного напряжения и при этом не перезаряжать, чтобы не допустить возгорания.

Подобная зарядка также способна заряжать (либо разряжать) до номинального напряжения для хранения батарей, ведь хранение полностью заряженных батарей тоже негативно сказывается на их ресурсе.
Возвращаясь к описанию параметров батарей, хочу разобрать параметр “C” – обычно встречаются цифры 10C, 20C, 30C и т. д. Данный параметр равен ёмкости элемента. Грубо говоря, 1С — 5000 mah составляет 5A за 1 час, а если батарея с током разряда 20C, то она способна полностью отдать свой заряд в 20 раз быстрее часа, то есть за 3 минуты. Но в то же время рекомендуемый ток заряда для большинства батарей не должен превышать 1С. Но значение максимального тока заряда указывается в описании к каждой батарее. Тем не менее, более качественный и щадящий заряд идет именно током 1С – то есть, если емкость батареи 2000 mah, то заряжать её желательно током не более 2 ампер. А если емкость батареи 4000 mah, то тот же 1С для такой батареи уже составит 4 ампера.
Если вы осилили всю эту теорию, переходим к самому интересному. Давайте научимся пользоваться калькулятором для расчета мультикоптеров.
Скажу сразу, он «буржуйский», поэтому просит внести лепту. Но мы- россияне, поэтому есть легальный способ пользоваться всеми функциями сего ресурса без финансовых вложений. Заключается он в перезагрузке сайта, если не находите в списке нужных двигателей или аккумуляторов в базе. При каждом заходе база обновляется. Но могу добавить, что многие двигатели являются аналогами, поэтому можно подобрать двигатель другого производителя с такими –же размерами и параметром KV.
Вот пример моей конфигурации в полном снаряжении:
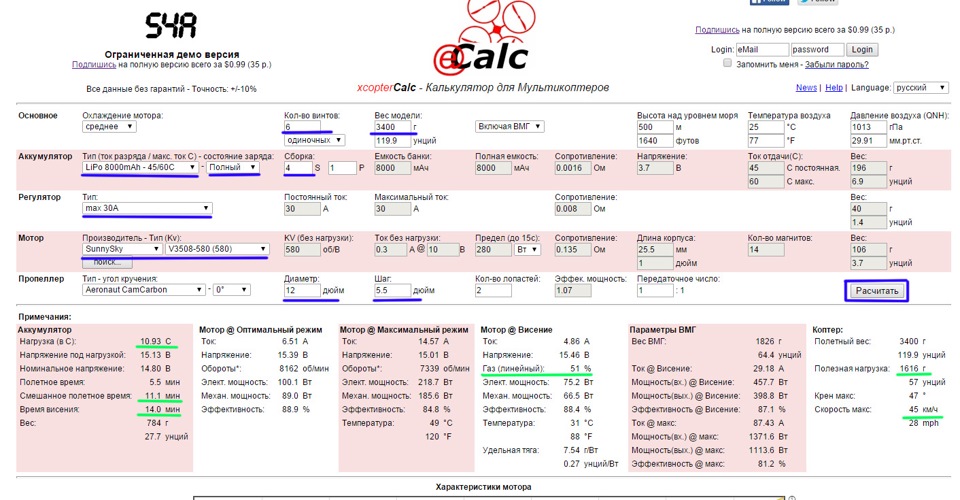
Синим я пометил параметры, которые менял в таблице с параметров по умолчанию после загрузки страницы, а зеленым – наиболее важные строки, на которые стоит обращать особое внимание при расчетах. Как видно, газ висения подобран практически идеально. Для полётного контроллера naza желательно подбирать значения в пределах от 40% до 60%. Газ висения не означает, что если вы оставите стик газа на управлении ровно посередине, мультикоптер начнет подниматься при переизбытке тяги, или опускаться при её недостатке. Нет, на самом деле полётный контроллер сам регулирует обороты двигателя, для того, чтобы оставаться на заданной высоте при положении стика газа ровно посередине. Но если газ висения будет более 60%, значит аппарат перегружен, нужно пробовать пропеллеры с большим шагом, либо большего размера (если это позволяет рама и характеристики двигателей).
Для примера я посчитал эту же конфигурацию, если установить пропеллеры 1447.
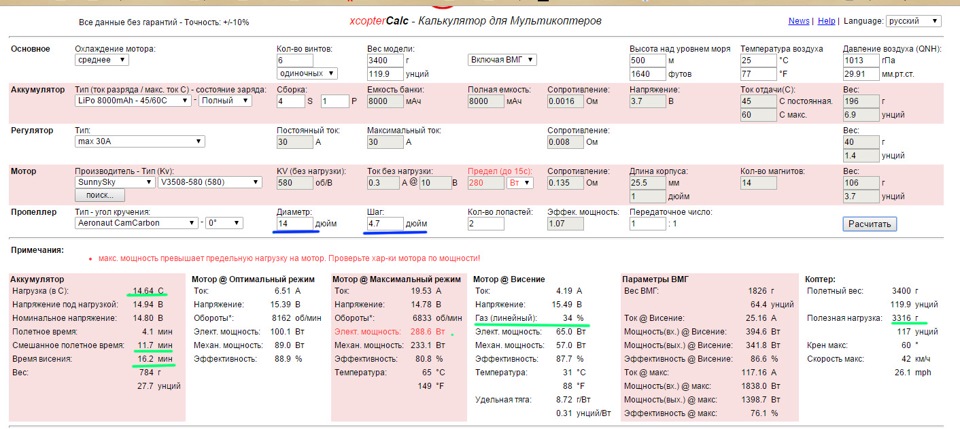
Видим, что совсем незначительное увеличение времени полёта ощутимо сказалось на нагрузке аккумулятора, которая возросла с 11 до 15С и нагрузке на мотор. В максимальном режиме даже выводится предупреждение о превышении допустимой нагрузки. Но при этом полезная нагрузка возросла почти вдвое, а газ висения снизился до 34%, то есть образовался небольшой избыток тяги. Такая конфигурация подошла бы, если бы я захотел повесить на свой коптер не GoPro, а камеру типа Panasonic GH4K или sony nex. Но тогда время полёта ощутимо сократится, ведь возрастет вес. Для полётов с такими камерами я приведу расчет в самом конце, а пока привожу пример, если на такой-же конфигурации использовать батарею большой ёмкости – 16000 mah. Её вес 1 кг (10С), она относительно недорогая – на сегодняшний день можно купить ее за 7300 руб с доставкой по РФ. Но и пропеллеры в расчетах уже ставлю не 1255, а 1355, так как возрастет вес аппарата.
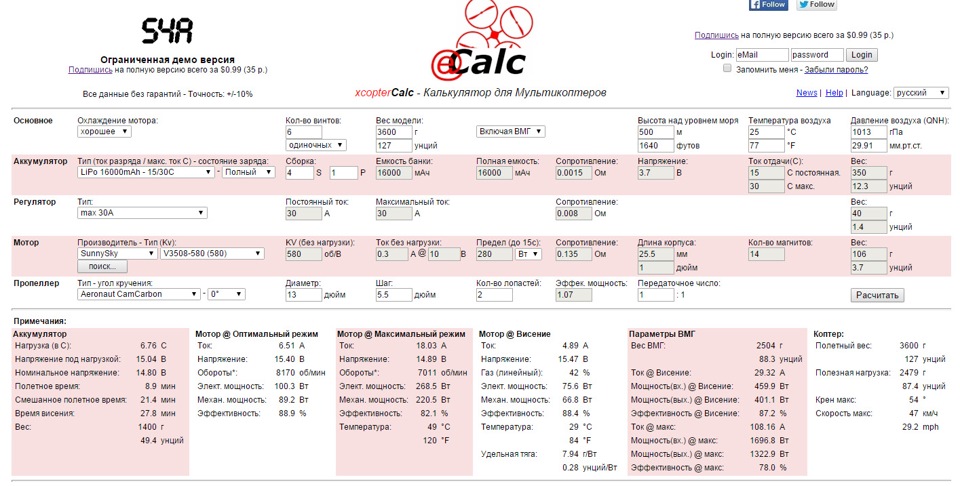
Расчетное время полёта в полном снаряжении уже составляет порядка 22 минут, а время висения подбирается к 30 минутам. На самом деле эти расчеты дают лишь приблизительное время полёта. В теории, в самой первой конфигурации расчетное время полёта 11 минут, а на практике оно составляет 16, а время висения 19 минут до звукового сигнала о достижении на одной из ячеек аккумулятора напряжения в 3,4 вольта под нагрузкой. И обратите внимание, нагрузка на аккумулятор составляет всего 6.76С. То есть, чем больше емкость аккумулятора, тем меньше нужно обращать внимание на эту цифру. Я бы даже сказал тем лучше, если эта цифра будет не в пределах 30-40, так как данный параметр скажется лишь на весе аккумулятора. Если расчетная нагрузка имеет запас почти в полтора раза, а пиковая нагрузка на аккумулятор и так обычно превышает почти вдвое заявленный параметр долгосрочной нагрузки (10-20С) (30-45С), нет смысла покупать более дорогой и тяжелый аккумулятор.
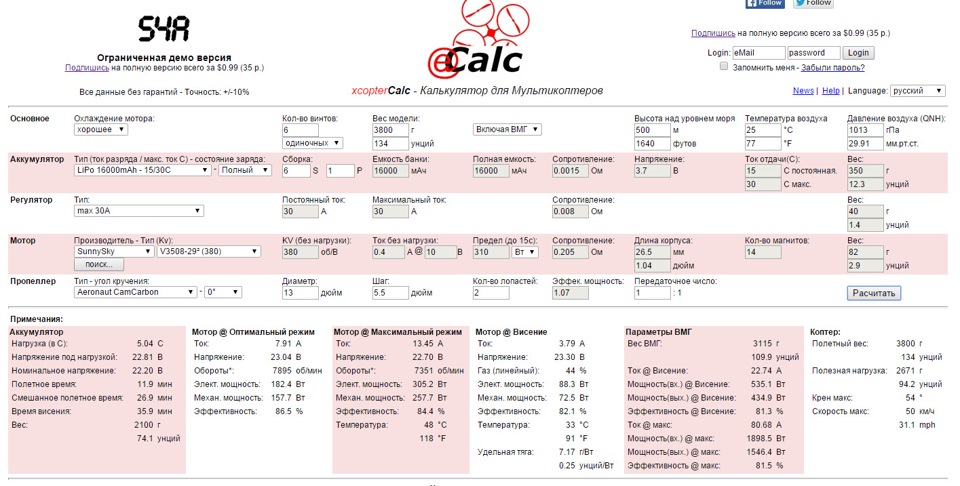
Если же нужно собрать настоящий грузоподъемный «долголёт», то тут нужны низко-оборотистые мощные двигатели такие как SunnySky kv380 и 6S батарея.
Что касается известного всем DJI Phantom 2, то его полётный вес составляет 1400 грамм, моторы dji 2312 kv960 (у первого «фантома» 2212 kv920), пропеллеры 9450 (у первого 9443), батарея 3S 5200 mah (у первого 2200 mah), регуляторы примерно на 20 ампер. Думаю, что вам будет интересно посчитать самим и понять, что будет с полётным временем и другими параметрами, если довесить на готовый аппарат 200 граммовый комплект FPV: видеопередатчик, с антенной и бортовой 2S-3S батареей. Скажу сразу, в среднем время полёта сократится на 5-7 минут. А вот 200 грамм для гексакоптера уже не так значительны. К тому же, многие задаются вопросом, есть ли в этом смысл, или даже устраивают дорогостоящие бессмысленные эксперименты без расчетов, по установке двух не оригинальных батарей большей ёмкости под лучи «фантома» вместо одной оригинальной. Смысла в этом совершенно нет, так как запас грузоподъемности у таких аппаратов очень мал. Теперь, понимая, как пользоваться калькулятором, советую вам посчитать самостоятельно.

Надеюсь, что моя статья будет для вас полезной. К вопросу о покупке деталей и запчастей для сборки, я пользуюсь известными всем иностранными торговыми площадками ebay и aliexpress, hbbyking и подобными.
Самолёты из бумаги и картона

Чтобы сделать такую потрясающую игрушку как самолёт, не нужно много времени и сил. Достаточно выбрать модель самолёта и следовать пошаговой инструкции. Ведь в нашей подборке только всё самое лучшее! В этой статье мы рассмотрим: как сделать самолёт из бумаги и картона своими руками.
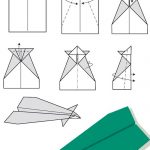
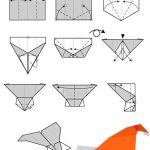
Самолёт оригами
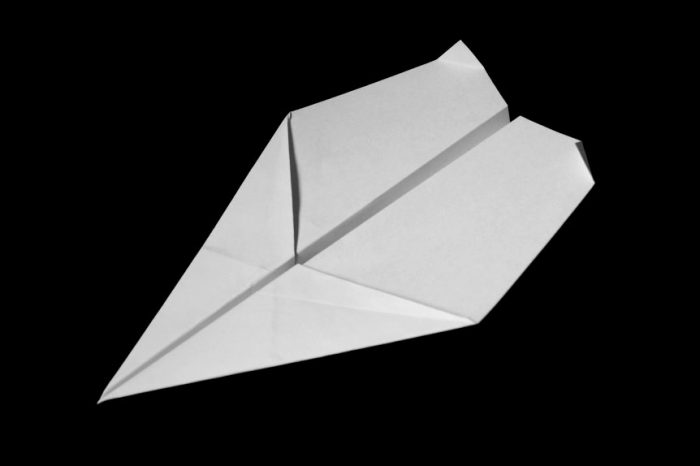
Вам понадобится: белый лист бумаги формата А4.
Мастер-класс
- Обратите внимание на условные обозначения в изображении: синей линией показано – где нужно сделать складку, зелёная стрелочка показывает направление, а красная точка обозначает место, где бумага окажется после складывания.
- Сложите вдоль пополам лист бумаги, затем разверните его.
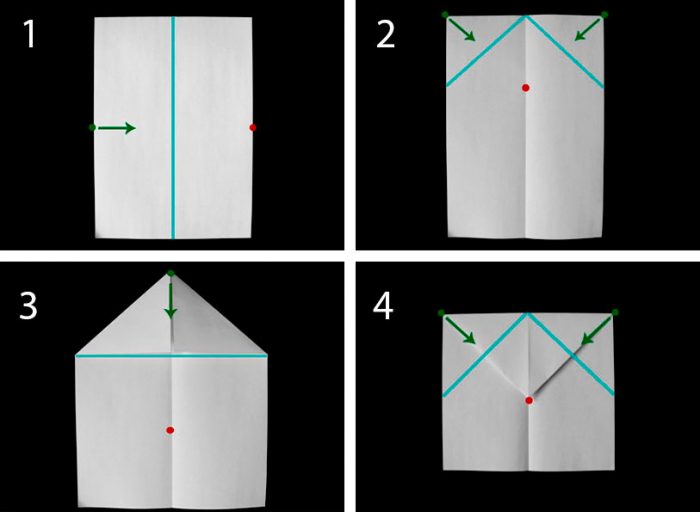
- Загните верхние углы к центру.
- Загните верхнюю сложенную часть вниз.
- Загните верхние углы в центр.
- Поднимите центральные углы вверх, затем опустите их половинки.
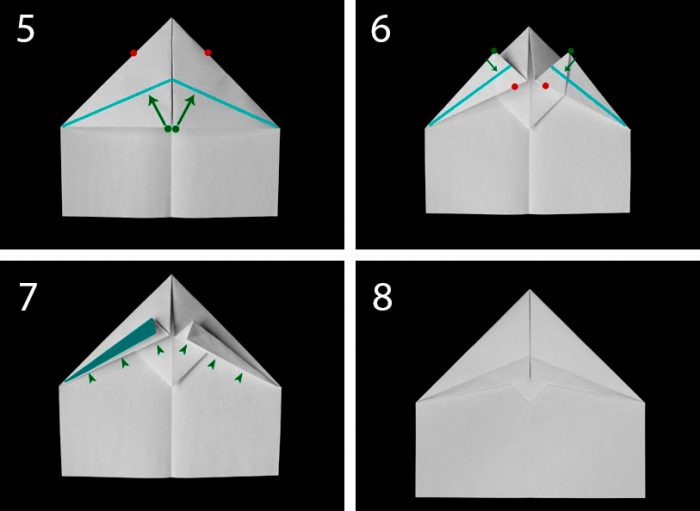
- Обратите внимание на изображение 7 и проверьте, чтобы с Вашим самолётом всё совпадало.
- Загните центральный угол вверх.
- Сложите самолёт пополам вдоль.
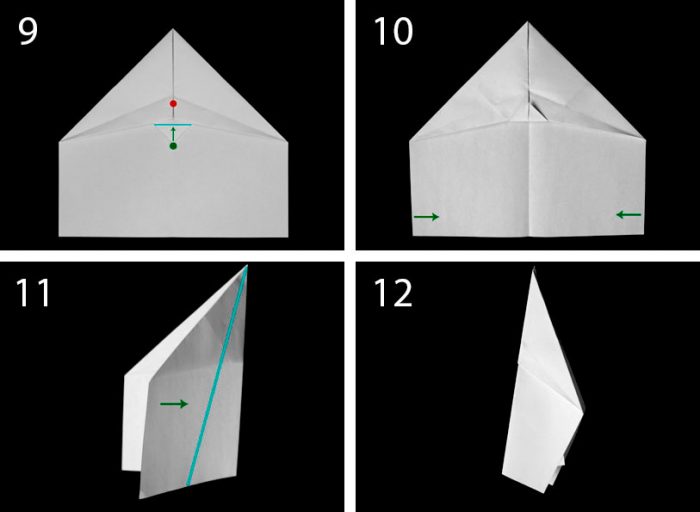
- Сформируйте крылья самолёта, как показано на фото инструкции.
Самолёт в технике оригами готов!
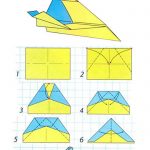
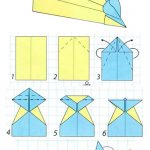
Схемы самолётов
Представляем Вашему вниманию 12 лучших схем оригами. Выберите наилучший для Вас вариант и с помощью пошаговой схемы сделайте самолёт. Желаем успехов и творческого настроения!




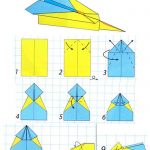



Самолётик из бумаги
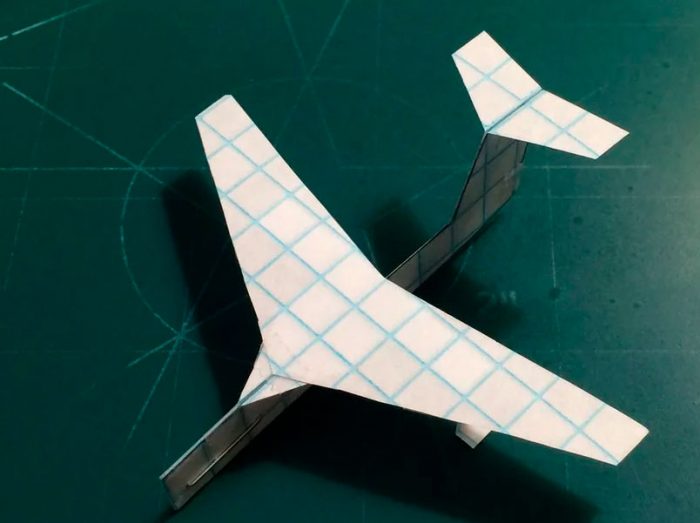
Вам понадобится: лист бумаги в клеточку, простой карандаш, линейка, ножницы, двухсторонний скотч, степлер.
Мастер-класс
- Сложите лист бумаги пополам.
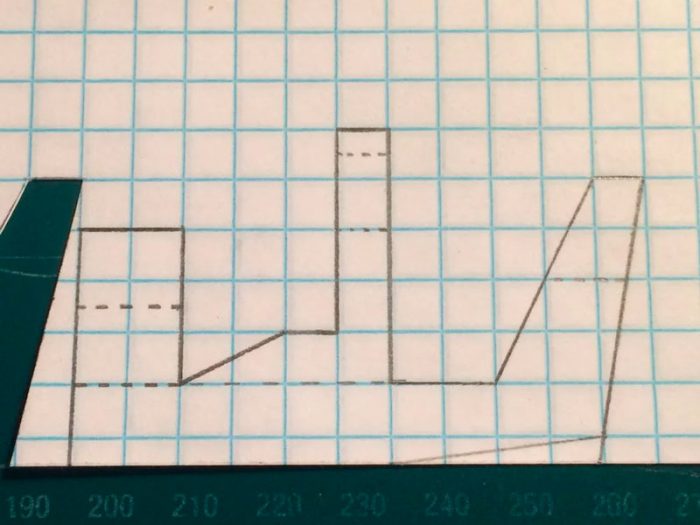
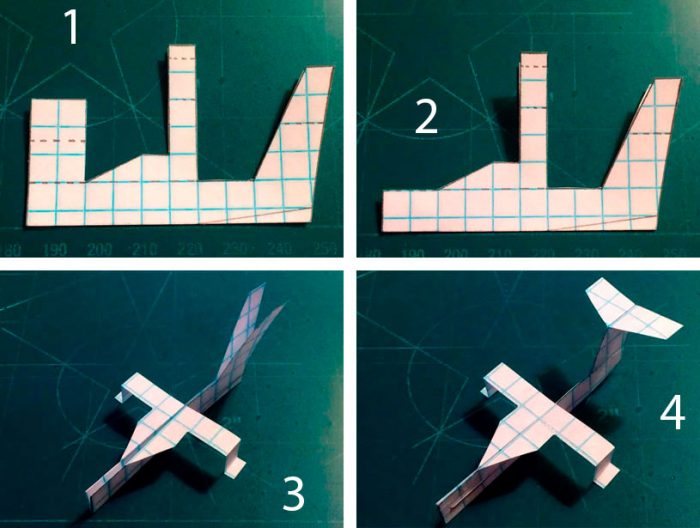
- Начертите конструкцию самолёта по клеточкам, как показано на изображении. Уделите внимание пунктирным линиям, так как по ним будут делаться загибы.
- Вырежьте заготовку, не касаясь основания, чтобы она получилась двойной.
- Сделайте загибы по пунктирным линиям.
- Закрепите маленькими отрезками скотча, места где самолёт разделяется.
- Скрепите степлером переднюю самолёта.
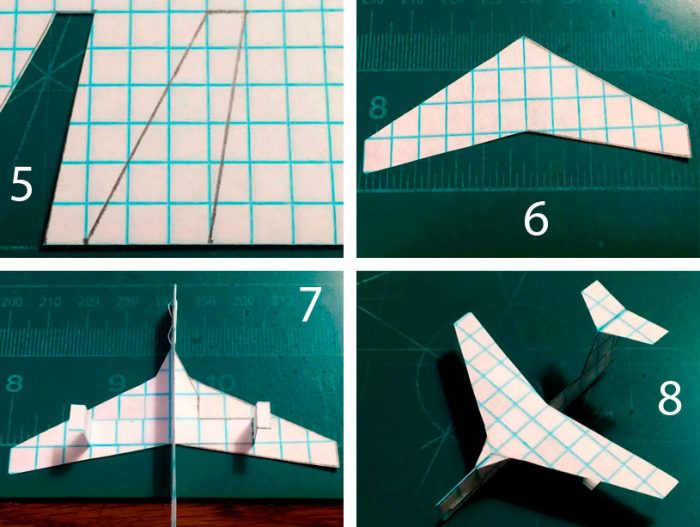
- Начертите крылья самолёта, затем вырежьте и прикрепите их, используя скотч.
Самолётик из бумаги готов! Рекомендую к просмотру данное видео!
Детский самолёт

Вам понадобится: коктейльная трубочка, цветная бумага, ножницы, скотч с рисунком.

Мастер-класс
- Отрежьте 2 полоски цветной бумаги.
- Слегка укоротите одну из полос.

- Соедините концы каждой из полос и закрепите скотчем. У Вас должно получиться 2 круга.
- Прикрепите круги скотчем с разных сторон коктейльной трубочки, как показано на изображении.
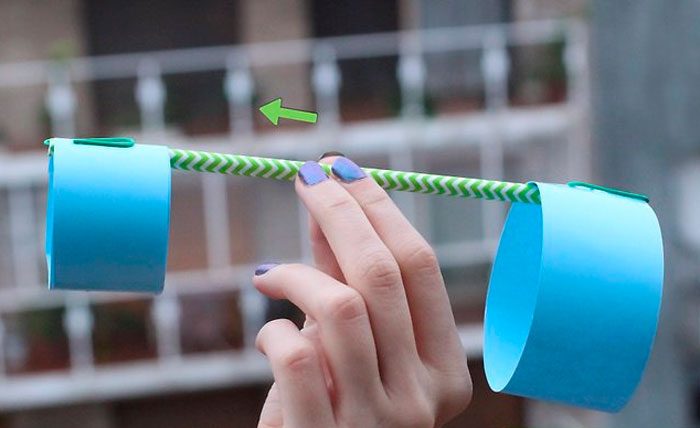
- Отправьте конструкцию в полёт.
Детский самолёт из бумаги и коктейльной трубочки готов!
Самолёт из картона

Вам понадобится: цветной картон, простой карандаш, ножницы, пустой спичечный коробок, линейка, клей ПВА.
Мастер-класс
- Вырежьте из цветного картона полосу длинною 21 см шириною 1,5 см.
- Вырежьте из картона 2 одинаковые полосы размером 17х4 см, затем закруглите углы.
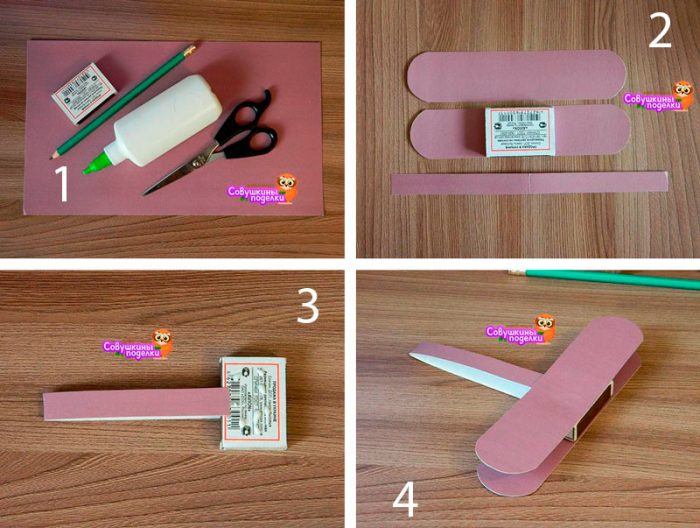
- Сложите длинную полоску пополам и приклейте её строго по центру спичечного коробка.
- Нанесите клей на верхнюю и нижнюю часть коробка и сразу же приклейте крылья.
- Вырежьте остальные детали: 2 полосы размером 5х1,5 см; винт и шасси.
- Срежьте и закруглите углы у одной из полос.
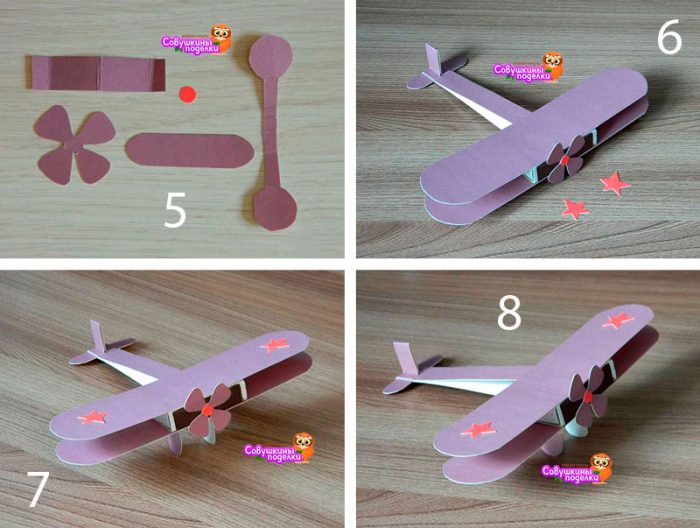
- Приклейте 2 полосы, сформировав хвост самолёта.
- Приклейте к самолёту винт и шасси.
Самолёт из картона и спичечного коробка готов! Рекомендую к просмотру данное видео!
Креативный самолёт

Вам понадобится: большая картонная коробка, куски картона, острый нож, ножницы, линейка, простой карандаш, пластиковая бутылка, спрей краска красного цвета, поролон в круглой форме, скотч, чёрный маркер.
Мастер-класс
- Начертите 2 прямоугольника на поверхности коробки, затем прорежьте их.
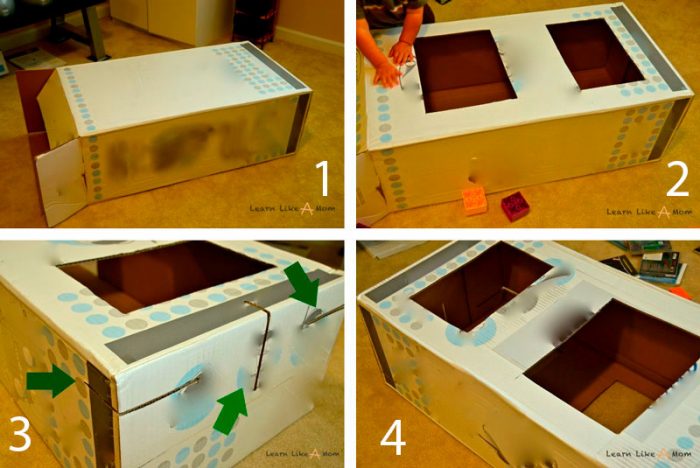
- Прорежьте 2 прямоугольника аналогичным образом с другой стороны коробки.
- Прорежьте в задней части коробки 3 отверстия для хвоста самолёта: одно отверстие вертикально по центру, а два горизонтально по бокам.

- Подготовьте картонные прямоугольники и вставьте их в хвостовые отверстия.
- Прорежьте горизонтально отверстия по бокам самолёта для крыльев.
- Подготовьте 2 картонных прямоугольника и вставьте их в боковые отверстия в качестве крыльев.
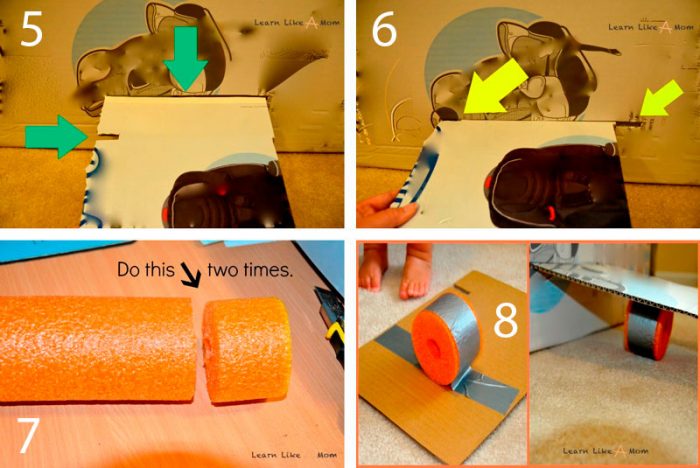
- Отрежьте кружочек от поролона и прикрепите его скотчем к крылу самолёта в качестве шасси. Аналогично прикрепите второй кружок к другому крылу.

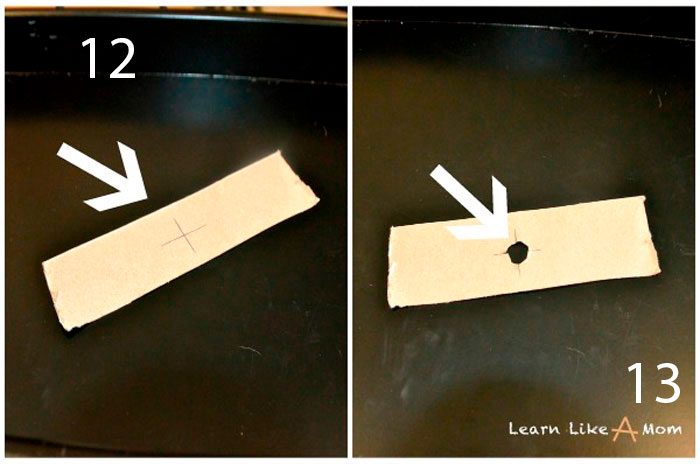
- Нарисуйте на картоне 2 штурвала самолёта, украсьте маркером и вырежьте их.
- Прикрепите на скотч штурвалы к коробкам, как показано на изображении.
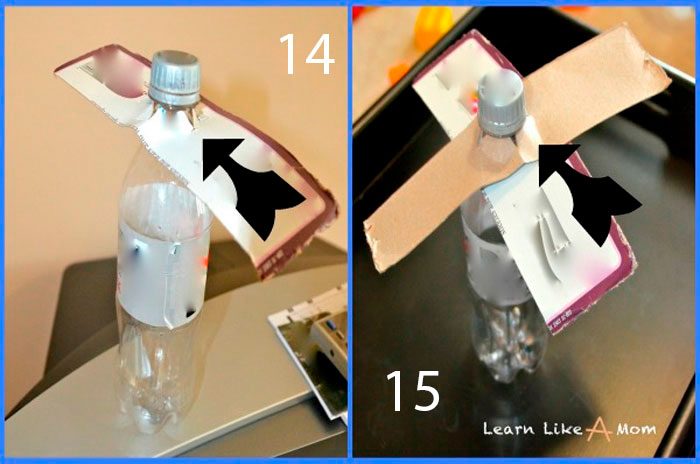
- Сделайте винт из картона и пластиковой бутылки.
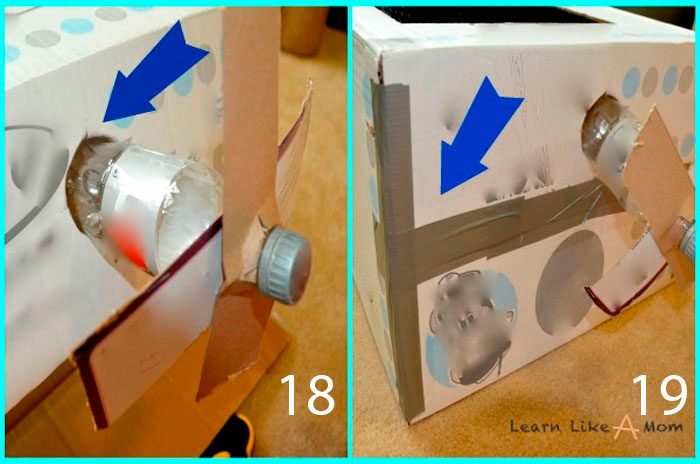
- Прорежьте круглое отверстие впереди самолёта и закрепите винт.
- Разберите самолёт по деталям.
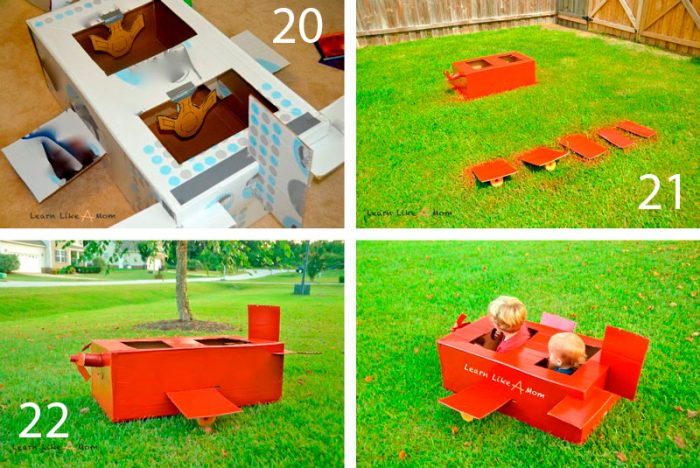
- Покрасьте самолёт и все его детали спрей краской.
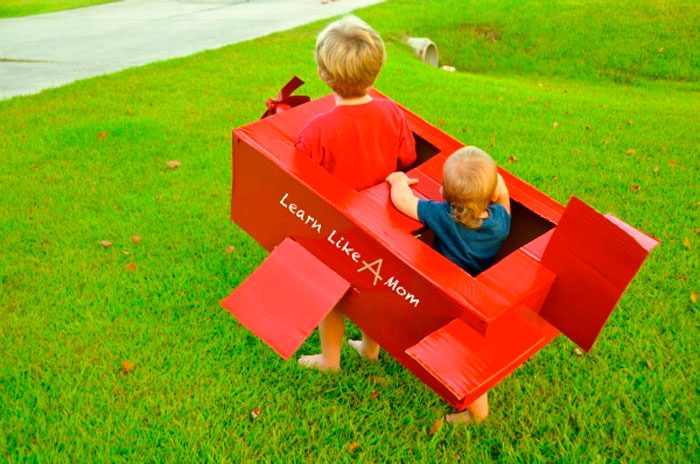
- Дождитесь высыхания и соберите самолёт.
Креативный самолёт готов! Такая игрушка очень понравится детям. Рекомендую к просмотру данное видео!
Собери сам: из чего можно сделать свой летательный аппарат
По оценкам экспертов, легкая авиация в России доживает свой век с малопонятной перспективой. Авиаторам негде учиться – закрываются центры по подготовке пилотов, проблемы с регистрацией, обслуживанием и ремонтом летательных аппаратов.
Тем не менее, количество авиаторов-любителей за последние пять лет выросло в два раза, хотя далеко не всякий желающий может позволить себе купить и содержать воздушное судно. По статистике, почти каждый второй авиатор-любитель еще и конструктор-самодельщик – сам выбирает и ремонтирует свой летательный аппарат.
ВЕРТОЛЕТ ИЗ ПОДРУЧНЫХ СРЕДСТВ
Увлечение 75-летнего авиаконструктора-любителя из Баксана сыновья и супруга не поддерживают. Время и деньги на ветер, считают они. Но, несмотря на это, жизнь Сафарби Батыргова прекрасна. Он увлечен, взволнован и уверен, что обязательно добьется своей цели.
Для воплощения мечты в ход идет все, что под рукой: дизельный двигатель старенькой иномарки, шкив и ремень безопасности от стиральной машины. Чтобы увеличить обороты двигателя великолепно подойдут детали отделки железной кровати времен 50-х годов.
Корреспонденты программы «Специальный репортаж» узнали, как построить собственный самолет.
Он тянется к небу и авиации еще со школьной скамьи. Но жизнь сложилась так, что нужно было помогать семье. После десятилетки Сафарби пошел работать: сначала на стройках, потом из-за болезни ног устроился банщиком.
Свой первый вертолет, правда, деревянный, он сконструировал прямо во дворе бани. Но летать ему не позволили, а вертолет в целях безопасности изъяла милиция. С тех пор прошло тридцать лет. Теперь на смену деревянной пришла железная птица.
«Расчеты у меня все в голове! Ни одного чертежа нет. Все я знаю!» — уверен конструктор.

Однако вероятность того, что детище Сафарби хотя бы на полметра поднимется над землей, очень низка. Тем не менее, свой первый полет конструктор намерен осуществить во что бы то ни стало.
ЛЕТАЮЩИЙ ХЛАМ
А вот Андрей Саркисян из Пятигорска смог оторваться от земли на своем вертолете на полтора метра. Неважно, что этот аппарат приземлился на правый бок. Профессиональный певец и музыкант вечерами подрабатывает в местных ресторанах. Конструированием своеобразных летательных аппаратов увлекся восемь лет назад. За это время собрал четыре вертолета.
«Полетел только один, но потом мне пришлось продать его двигатель, потому что нужны были средства», — признается Андрей.
Двигатели от мотоциклов «Иж» и «Ява», крупные самодельные станки и станочки для резки металла и даже втулка от хвостового винта Ми-2 – в общем, грудой металла, железа пластика и непонятным обывателям материалом забиты двор, гараж и подвал мастера.

Ради того, чтобы летать на аппаратах собственной конструкции, Саркисян пытается получить удостоверение пилота.
ЧТО ТАКОЕ «БЕГОЛЕТ»
Профессиональный авиаконструктор Александр Бегак свой первый летательный аппарат сделал в шесть лет. Это была ракета, которая разнесла детскую комнату. Еще спустя шесть лет, Александр построил свой первый самолет.
Сейчас Александр – автор 26 летательных аппаратов. Самый известный из них — так называемый «Беголет» – это машина, которая ездит и летает, а весит всего 60 килограммов.
«Беголет» был придуман из-за наших дорог. На нем можно приземлиться в любом месте, доехать за хлебом или оказать первую помощь, сделать уколы и улететь. Ведь если дождь прошел, по России нигде не проехать. Вот так и родился «Беголет», — рассказывает генеральный конструктор, председатель Дискретно-инновационного Кластера малой авиации Александр Бегак.
Без малой авиации наша страна никак не сможет, считает конструктор. В советское время местные воздушные авиалинии обеспечивали полные покрытия как центра России, так и Дальнего Востока и Сибири. Тогда только пятигорский авиаотряд насчитывал более 350 малых самолетов. Сегодня на всю Россию таких аппаратов не больше трех тысяч, и все они в частных руках.

ТРУДНОСТИ ПОЛЕТА
Большинство пилотов не может позволить себе ремонтировать авиатехнику в специализированных салонах. Их по всей стране единицы. К тому же, это дорого. Ремонт небольшого самолета будет стоить, как новый автомобиль, поэтому пилоты стараются делать все своими силами.
Чтобы получить корочку пилота, сейчас надо выложить почти 700 тысяч рублей. При этом учиться особо негде – авиационных учебных центров почти не осталось. Позволить себе покупку летательного аппарата и получить сертификацию – тоже дорогое удовольствие. На всю страну всего один стол регистрации самолетов – в Москве.

Кроме этого, нужно каждый год продлевать ТО воздушного судна. Стоимость документа – порядка 150 тысяч рублей.
«Так организован процесс, что требуется не реальное техническое обслуживание, а заставляют просто покупать эту бумажку через коммерческие структуры. Получается, ты должен купить документ, а потом пойти к механику и столько же заплатить, чтобы он сделал ежегодное ТО», — сетует пилот Эдуард Лосев.
Пока вся малая авиация держится на энтузиазме тех, кто уже не может обойтись без неба. Авиаторам от этого нет никакой выгоды – сплошное удовольствие.