Мощность и вращающий момент электродвигателя. Что это такое?
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
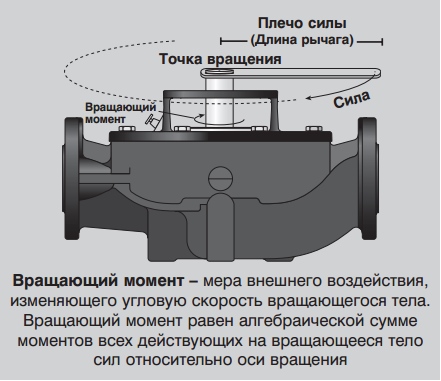
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.
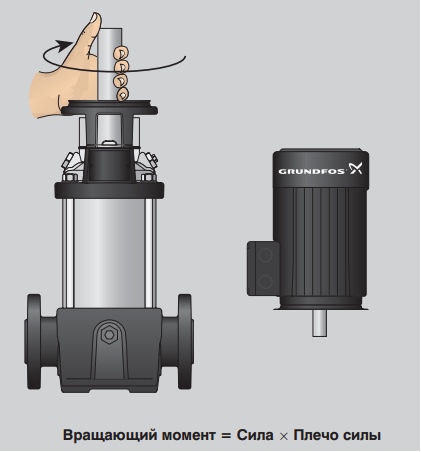
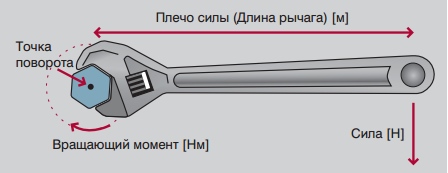
Вращающий момент (T) — это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).

Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы — или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.
Работа и мощность
Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила — любая сила — вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени.
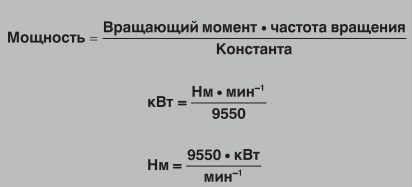
Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w).
![]()
Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин.
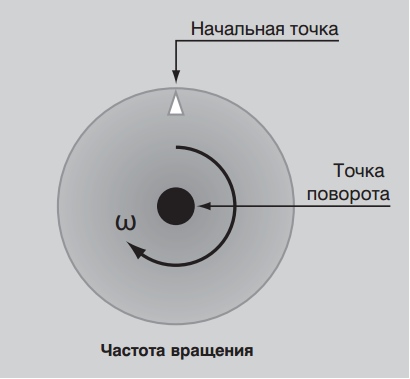
Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1.
Приведем единицы измерения к общему виду.
Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность.
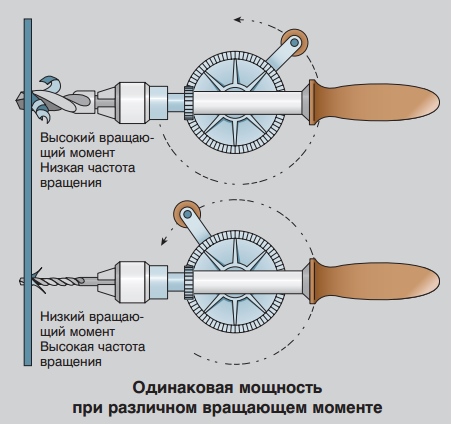
Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются.
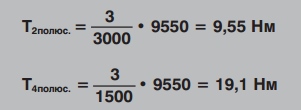
Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью.
Как образуется вращающий момент и частота вращения?
Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются.
В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения.
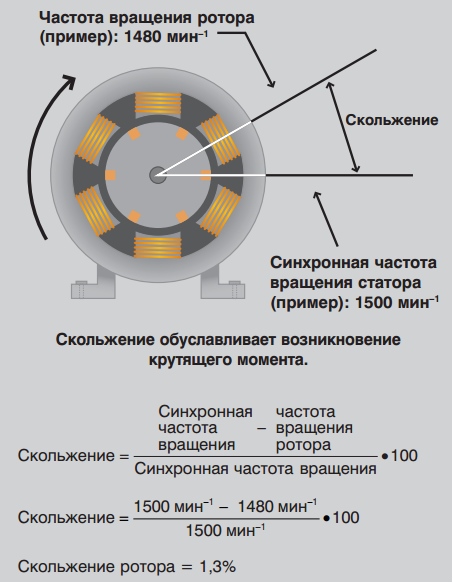
Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение.
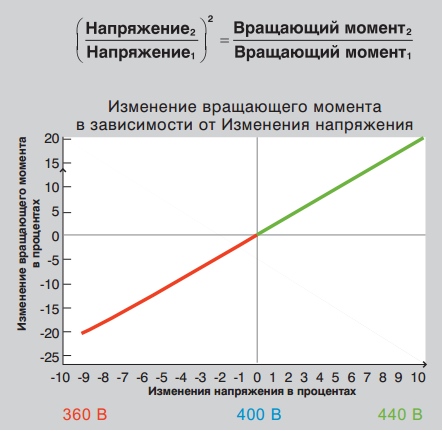
Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле:

Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%.
Потребляемая мощность электродвигателя
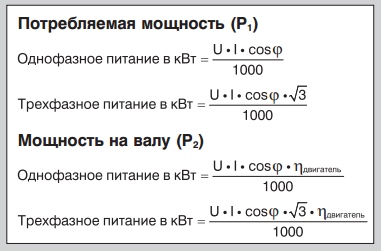
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Момент электродвигателя
Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.
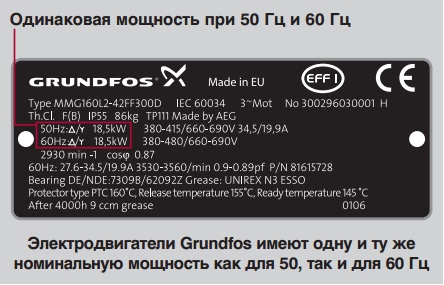
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
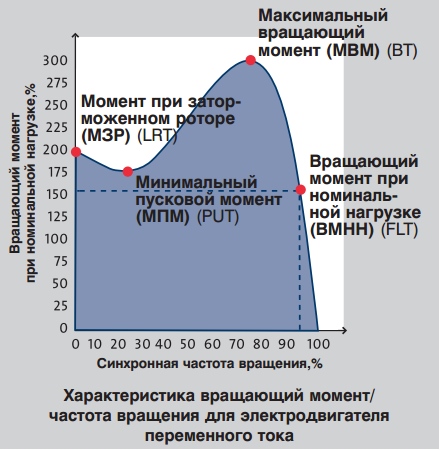
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
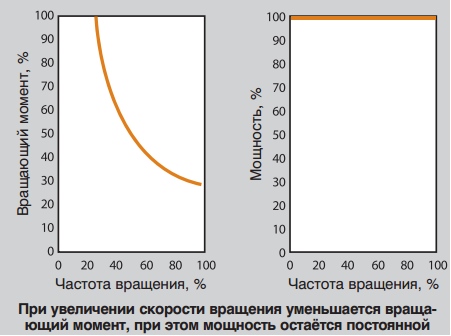
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
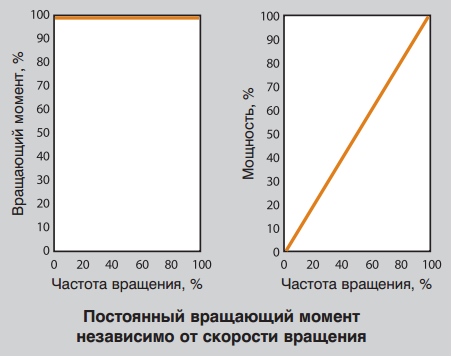
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
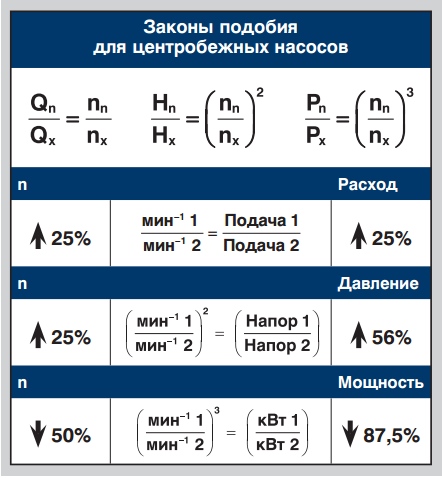
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
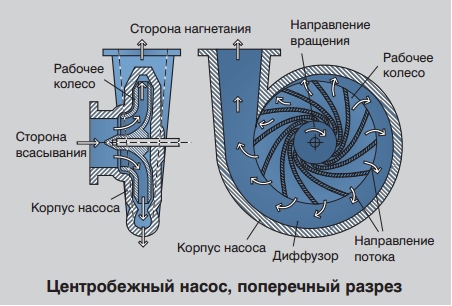
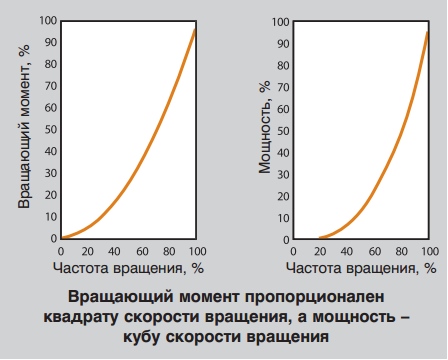
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
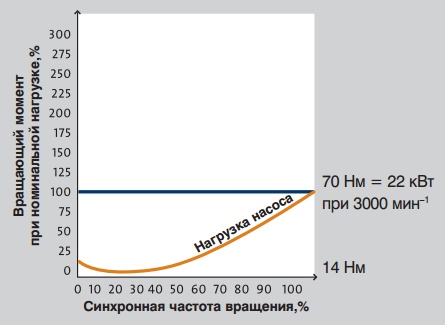
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
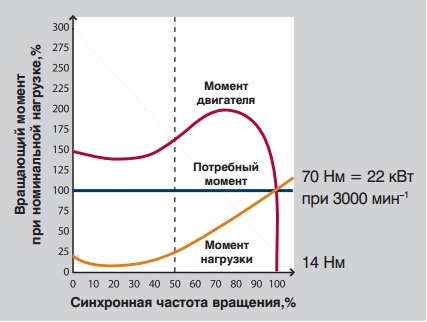
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Соответствие электродвигателя нагрузке
Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения.
Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса.
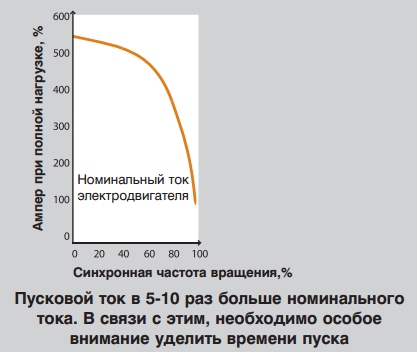
Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки.
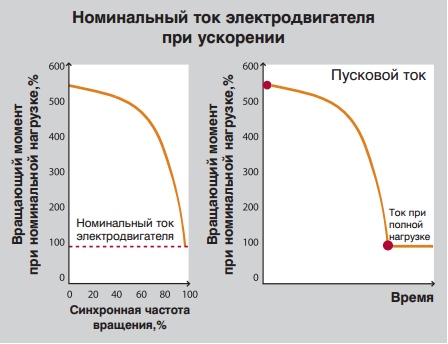
Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева.
Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности.
Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени.
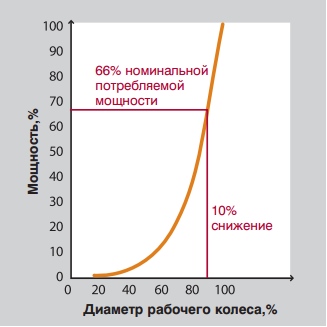
Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса.
Время пуска электрдвигателя
Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий.
Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы:
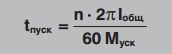
tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке
n = частота вращения электродвигателя при полной нагрузке
Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс.
Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных.
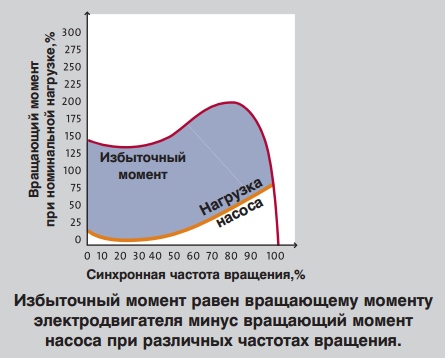
Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения.
Мизб можно рассчитать по следующим формулам:

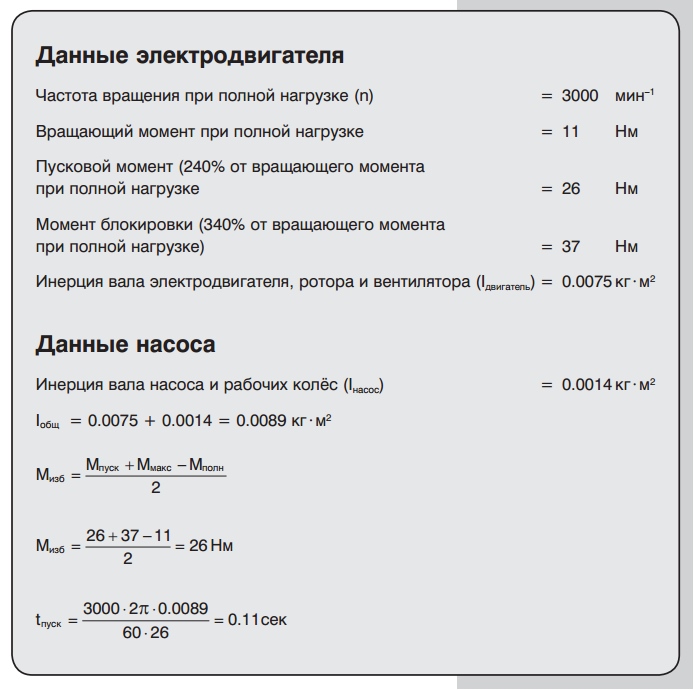
Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды.
Число пусков электродвигателя в час
Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции.
Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса.
Мощность и КПД (eta) электродвигателя
Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом.
При производстве насосов используются следующие обозначения этих трёх различных типов мощности.
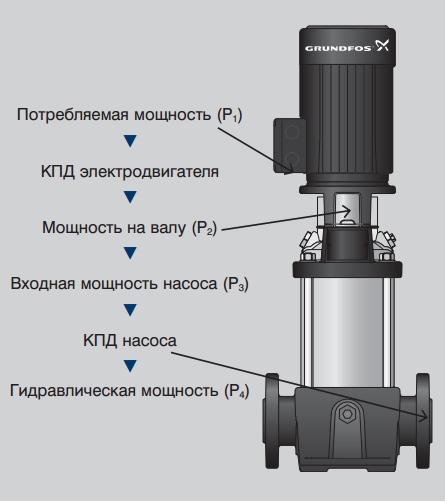
P1 (кВт) Входная электрическая мощность насосов — это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя.
P2 (кВт) Мощность на валу электродвигателя — это мощность, которую электродвигатель передает на вал насоса.
Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию.
Мощность двигателя — как работает и что это такое,на что влияет
Изобретенный более 100 лет назад поршневой двигатель внутреннего сгорания (ДВС), на сегодняшний день все еще является самым распространенным в автомобилестроении. При выборе модели двигателя своего будущего автомобиля покупатель может предварительно ознакомиться с его основными характеристиками. В этой статье мы подробно расскажем об основных показателях двигателей внутреннего сгорания, что они собой представляют и как влияют на работу.
Важнейшими характеристиками двигателя являются его мощность, крутящий момент и обороты, при которых эта мощность и крутящий момент достигаются.
Обороты двигателя
Под широкоупотребимым термином «обороты двигателя» имеется в виду количество оборотов коленчатого вала в единицу времени (в минуту).
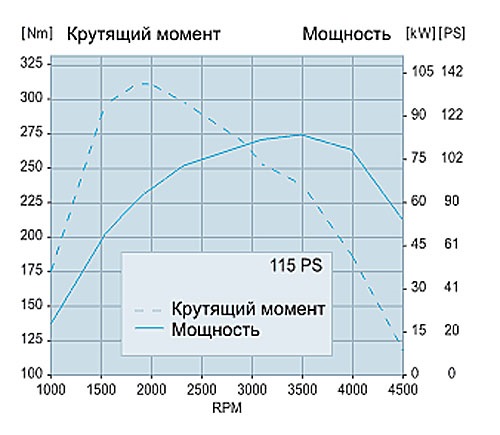
И мощность, и крутящий момент — величины не постоянные, они имеют сложную зависимость от оборотов двигателя. Эта зависимость для каждого двигателя выражается графиками, подобными нижеследующему:
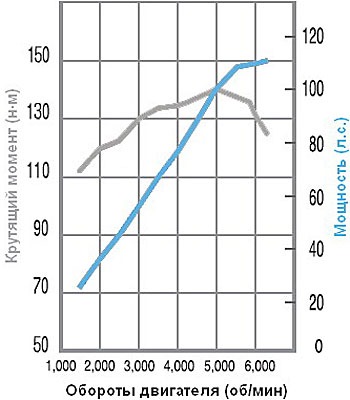
Производители двигателей борются за то, чтобы максимальный крутящий момент двигатель развивал в как можно более широком диапазоне оборотов («полка крутящего момента была шире»), а максимальная мощность достигалась при оборотах, максимально приближенных к этой полке.
Мощность двигателя
Чем выше мощность, тем большую скорость развивает авто
Мощность — это отношение работы, выполняемой за некоторый промежуток времени, к этому промежутку времени. При вращательном движении мощность определяется как произведение крутящего момента на угловую скорость вращения.
Мощность двигателя последнее время все чаще указывают в кВт, а ранее традиционно указывали в лошадиных силах.
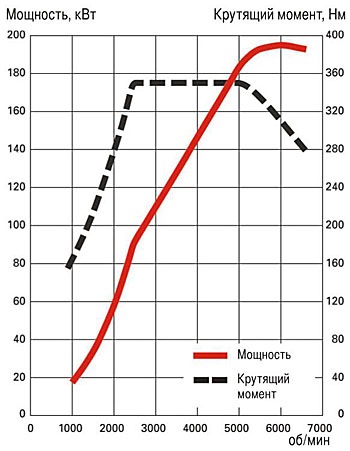
Как видно на приведенном выше графике, максимальная мощность и максимальный крутящий момент достигаются при различных оборотах коленвала. Максимальная мощность у бензиновых двигателей обычно достигается при 5-6 тыс. оборотов в минуту, у дизельных — при 3-4 тыс. оборотов в минуту.
График мощности для дизельного двигателя:
Крутящий момент
Крутящий момент характеризует способность ускоряться и преодолевать препятствия
Крутящий момент (момент силы) — это произведение силы на плечо рычага. В случае кривошипно-шатунного механизма, данной силой является сила, передаваемая через шатун, а рычагом — кривошип коленчатого вала. Единица измерения — Ньютон-метр.
Иными словами, крутящий момент характеризует силу, с которой будет вращаться коленвал, и насколько успешно он будет преодолевать сопротивление вращению.
На практике высокий крутящий момент двигателя будет особенно заметен при разгонах и при передвижении по бездорожью: на скорости машина легче ускоряется, а вне дорог — двигатель выдерживает нагрузки и не глохнет.
Виды мощности
Для определения характеристик двигателя применяют такие понятия мощности как:
- индикаторная;
- эффективная;
- литровая.
Индикаторной называют мощность, с которой газы давят на поршень. То есть, не учитываются никакие другие факторы, а только давление газов в момент их сгорания. Эффективная мощность, эта та сила, которая передается коленчатому валу и трансмиссии. Индикаторная будет пропорциональной литражу двигателя и среднему давлению газов на поршень.
Эффективная мощность двигателя будет всегда ниже индикаторной.
Также есть параметр, называемый литровой мощность двигателя. Это соотношение объема двигателя к его максимальной мощности. Для бензиновых моторов литровая мощность составляет в среднем 30-45 кВт/л, а у дизельных – 10-15 кВт/л.
Как узнать мощность двигателя автомобиля
Можно посмотреть в документах на машину, но иногда требуется узнать мощность автомобиля, который подвергался тюнингу или давно находится в эксплуатации. В таких случаях не обойтись без динамометрического стенда. Его можно найти в специализированных организациях и на станциях техобслуживания. Колеса автомобиля помещаются между барабанами, создающими сопротивление вращению. Далее имитируется движение с разной нагрузкой. Компьютер сам определит мощность двигателя. Для более точного результата может понадобиться несколько попыток.
Роль мощности и крутящего момента двигателя
Для обеспечения лучших динамических показателей двигателя, производители стараются наделить силовой агрегат максимальным крутящим моментом, который будет достигаться в более широком значении оборотов двигателя.
Чтобы правильно оценить роль этих двух понятий, стоит обратить внимание на следующие факты:
- Взаимосвязь мощности и крутящего момента можно выразить в формуле: P = 2П*M*n, где Р – это мощность, M – показатель крутящего момента, а n – количество оборотов коленвала в единицу времени.
- Крутящий момент более конкретный показатель характеристики двигателя. Низкий крутящий момент (даже при высокой мощности) не позволит реализовать потенциал двигателя: имея возможность разогнаться до высокой скорости, автомобиль будет достигать этой скорости невероятно долго.
- Мощность двигателя будет возрастать с повышением оборотов: чем выше, тем больше мощность, но до определенных пределов.
- Крутящий момент увеличивается с повышением количества оборотов, но при достижении максимального значения показатели крутящего момента снижаются.
- При равных показателях мощности и крутящего момента более эффективным будет двигатель с меньшим расходом топлива.

Вопрос — ответ
1. Автомобиль в глубокой колее сел на брюхо: ведущие колеса вертятся, не касаясь земли. Водитель упрямо газует. Какую полезную мощность может при этом выдать двигатель?
Б — в зависимости от оборотов;
Г — в зависимости от включенной передачи.
Правильный ответ: В. Автомобиль не движется, мотор не совершает полезной работы. Значит, и полезная мощность равна нулю.
2. Заднеприводный автомобиль с блокированным дифференциалом движется по плохой дороге. Как распределена мощность между ведущими колесами?
Б — обратно пропорционально частоте вращения каждого из колес;
В — в зависимости от сил сцепления с покрытием;
Г — прямо пропорционально частоте вращения каждого из колес.
Правильный ответ: В. При блокированном дифференциале ведущие колеса вращаются с одинаковой скоростью, но моменты на них не выравниваются — они зависят только от сцепления с дорогой. Следовательно, реализуемые колесами мощности тоже определяются силами сцепления с покрытием.
3. На что влияет мощность мотора?
А — на динамику разгона;
Б — на максимальную скорость;
В — на эластичность;
Г — на все перечисленные параметры.
Правильный ответ: Г. Часто полагают, что машину тащит исключительно крутящий момент. Но поставщиком крутящего момента является мотор. Если тот перестанет снабжать колеса энергией, то все динамические параметры будут равны нулю. Например, резко тронуться на повышенной передаче не удастся: при низких оборотах просто не хватит мощности. А она-то и определяет запас энергии, которую способен выдать двигатель. И влияет на все перечисленные параметры.
Частотный преобразователь: принцип работы для электродвигателя, асинхронного двигателя, как работает преобразователь частоты с трехфазным двигателем
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).

Насос водяной

Канальный вентилятор
Рассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.

Асинхронный электрический двигатель
Трехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая — в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 — s)
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.

Шильдик электродвигателя EQPIII Toshiba
Принцип работы частотного преобразователя
Вот тут и приходит на помощь частотный преобразователь, иначе говоря ЧРП (частотно-регулируемый привод). Он, как говорилось в самом начале, позволяет задавать на своем выходе заданные в настройках амплитуду напряжения и частоту переменного тока.
Частота вы выходе может регулироваться в диапазоне 0.01 — 590 Гц если брать инверторы серии AS3 Toshiba. Для серии S15 Toshiba диапазон регулирования находится в пределах 0.01 — 500 Гц. Для серии nC3E Toshiba диапазон регулирования находится в пределах 0.01 — 400 Гц. Это объясняется функциональным назначением разных серий ПЧ.
Напряжение на выходе может изменяться в диапазоне от 0 В до напряжения питания ПЧ, т.е. текущего напряжения на входе частотного преобразователя. Это свойство можно использовать для получения нужного выходного напряжения и частоты, что ценно, например, для испытания стендового оборудования. Правда для этого придется использовать специальный выходной синусный фильтр, чтобы получить чистые синусоидальное напряжение и ток.
С частотой все понятно, но зачем нужно изменять напряжение?
Дело в том, что для поддержания определенного магнитного поля в обмотках статора требуется изменять не только частоту, но и напряжение. Получается, что частота должна соответствовать определенному напряжению. Этот называется законом скалярного управления U/f (V/f), где U или V — напряжение.
Также существует закон векторного регулирования. Векторное регулирование используется для оборудования, где требуется поддерживать необходимый крутящий момент на валу при низких скоростях электродвигателя, высокое быстродействие и точность регулирования частоты вращения. Векторное управление представляет собой математический аппарат в «мозге» частотного преобразователя, который позволяет точно определять угол поворота ротора по токам фаз двигателя.
Использование частотника позволяет убрать большой пусковой ток, достигая таким образом значительного экономического эффекта при частых пусках и остановках электродвигателя.
Схема частотного преобразователя
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.

Схема преобразователя частоты
Напряжение в звене постоянного тока после выпрямления трехфазного напряжения будет равно согласно формуле: 380*1,35 = 513 В.
Дроссель DCL в звене постоянного тока позволяет дополнительно сгладить пульсации напряжения после диодного моста и выполняет функции снижения гармоник выпрямителя, инжектируемых в питающую сеть.
Транзисторы T1-T6 инвертора с помощью специального алгоритма системы управления генерируют на клеммы электродвигателя 3 пакета импульсов, разнесенных по трем фазам на 120 градусов во времени. Ни рисунке ниже показана только одна фаза: пачка выходных импульсов широтно-импульсной модуляции (ШИМ), проходя через обмотку электродвигателя, сгладится до формы, напоминающей синусоиду. Частота импульсов ШИМ (опорная частота) в промышленных преобразователях обычно составляет 3-4 кГц, но для ПЧ малой мощности может доходить до 16 кГц. Чем выше частоты ШИМ, тем будет меньше гармонических искажений «синусоиды» на выходе инвертора. Но при этом возрастают тепловые потери на силовых транзисторах, что уменьшает КПД. В ПЧ Toshiba величину частоты можно изменять, регулируя таким образом тепловые потери.

ШИМ инвертора
Выходное напряжение частотного преобразователя будет всегда ниже входного сетевого напряжения. Это связано с потерями в силовом модуле и алгоритме получения ШИМ импульсов.
Между частотным преобразователем и электродвигателем можно установить дополнительный фильтр, позволяющий значительно улучшить форму выходного напряжения после частотника. Это необходимо для того, чтобы импульсы ШИМ не разрушали изоляцию обмоток двигателя и не вызывали перенапряжения на конце длинного кабеля. Подробнее о выходных фильтрах.
Выбор частотного преобразователя
При проектировании частотно-регулируемого электропривода необходимо учесть множество нюансов. При выборе частотника руководствуются следующими критериями:
- Назначение преобразователя. Многие производители выпускают ПЧ, предназначенные для электродвигателей насосов, лифтов, электроприводов вентиляционных систем, а также универсальные устройства общепромышленного назначения. Специализированные частотники производят под конкретное технологическое оборудование. Возможность их адаптации существенно ограничена. Общепромышленные регуляторы частоты можно настраивать под различные приводы.
- Способ управления и поддержка различных протоколов связи. Регулируемые по частоте электроприводы обычно интегрируются в комплексные системы автоматизации и удаленного контроля и управления. Частотный преобразователь должен быть укомплектован контроллером, который поддерживает связь по протоколу, применяемому в конкретной АСУТП.
- Мощность и перезагрузочная способность. Номинальная электрическая мощность преобразователя должна быть больше аналогичного параметра электродвигателя на 15-30%. При расчете мощности учитывают пусковые токи электрической машины, пиковые нагрузки на двигатель и их длительность. Ошибки ведут к перегреву частотника, выходу из строя силовых транзисторов или тиристоров.
- Диапазон и точность регулирования. Интервал изменения частоты и точность ее задания должны соответствовать требованиям условий технологического процесса. Возможность изменения частоты у скалярных преобразователей 1:10, если требуется более широкий диапазон, необходим частотник с векторным управлением.
- Электромагнитная совместимость. Частотный преобразователь чувствителен к электромагнитным помехам и сам является их источником. Выбор устройства осуществляется на основании условий его установки. При необходимости может потребоваться его установка в отдельном помещении, подключение специальных фильтров и использование экранированных кабелей. Компания «Данфосс» выпускает преобразователи, укомплектованные встроенными ЭМ-фильтрами.
- Наличие функций отключения двигателя при перегреве, дисбалансе фаз, перегрузках, других аварийных и ненормальных режимов работы.
- Наличие автоматизированного управления по событиям. Для синхронизации работы промышленного оборудования необходимы частотники, имеющие функции регулирования по достижению определенной величины технологических параметров.
- Количество входов и выходов для подключения удаленных устройств управления и контроля. На случай модернизации САР или усложнения АСТП рекомендуется выбрать частотники с избыточным количеством аналоговых и дискретных разъемов. Для электроприводов автоматизированных систем рекомендуется подобрать частотный регулятор со встроенной памятью и функцией ведения журнала событий.
- Номинальный ток и напряжение. Электрические параметры частотника должны соответствовать характеристикам электродвигателя.
 Выбор частотного регулятора для промышленного оборудования делается на основании расчетов по специализированным методикам. Малейшие ошибки могут привести к авариям, которые могут иметь непредсказуемые последствия. Проектирование электропривода и выбор ПЧ целесообразно доверить специалистам по автоматизации. Правильный выбор частотника обеспечивает экономию электроэнергии до 40-50%, снижение затрат на ремонт и обслуживание электропривода и дает неплохой экономический эффект.
Выбор частотного регулятора для промышленного оборудования делается на основании расчетов по специализированным методикам. Малейшие ошибки могут привести к авариям, которые могут иметь непредсказуемые последствия. Проектирование электропривода и выбор ПЧ целесообразно доверить специалистам по автоматизации. Правильный выбор частотника обеспечивает экономию электроэнергии до 40-50%, снижение затрат на ремонт и обслуживание электропривода и дает неплохой экономический эффект.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, в том числе насосов и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначенные для приема и преобразования энергии, защиты электрооборудования от токов КЗ, перегрузки) позволяют:
- плавно запускать двигатель, а, следовательно, уменьшать его износ;
- останавливать, поддерживать частоту вращения вала двигателя.
Комплектные ЧРП шкафного исполнения до 1кВ выполняют те же задачи по отношению к двигателям с мощностью 0,55 – 800 кВт. Привод нормально работает, когда напряжение в электросети находится в пределах от -15% до +10%. При безостановочной работе снижение мощности наступает, если напряжение составляет 85%-65%. Общий коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется посредством автоматического включение резерва (АВР).
Преимущества использования
С точки зрения оптимизации и потенциальные преимущества предоставляют возможность:
- регулировать процесс с высокой точностью;
- удалённо диагностировать привод;
- учитывать моточасы;
- следить за неисправностью и старением механизмов;
- повышать ресурс машин;
- значительно снижать акустический шум электродвигателя.
Комплектация регулируемого привода
Частотный преобразователь формируется из трёх компонентов:
- Управляемый, либо неуправляемый выпрямитель, отвечающий за формирование напряжения ПТ (постоянного тока), поступающего от питания.
- Фильтр (в виде конденсатора), осуществляющий дополнительное сглаживание напряжения.
- Инвертор, моделирующий напряжение нужной частоты.
Самостоятельное подключение преобразователя
Перед тем, как приступать к подключению устройства следует воспользоваться обесточивающим автоматом, он обеспечит отключение всей системы в случае короткого замыкания на любой из фаз.
Существует две схемы соединения электродвигателя с частотным преобразователем:
- «Треугольник».
Схема актуальна, если требуется управлять однофазным приводом. Уровень мощности преобразователя в схеме при этом составляет до трёх киловатт, а мощность не теряется.
- «Звезда».
Способ, подходящий для подключения клемм трёхфазных частотников, питаемых промышленными трёхфазными сетями.

На рисунке схема подключения частотника 8400 Vector
Для ограничения пускового тока и снижения пускового момента при запуске электрического двигателя по мощности превосходящего 5 кВт, применяется переключение «звезда-треугольник».
Когда на статор пускается напряжение, то фигурирует подключение устройства по типу «звезда». Как только значение скорости двигателя начинает соответствовать номинальному, поступление питания осуществляется по схеме «треугольник». Но этот приём используется, только когда технические возможности позволяют подключаться по двум схемам.
В объединённой схеме «звезды» и «треугольника» наблюдаются резкие скачки токов. При переходе на второй тип подключения показания по вращательной скорости значительно уменьшаются. Для восстановления прежнего режима работы и частоты оборотов следует осуществить увеличение силы тока.
Наиболее активно применяются частотники в конструкции электрического двигателя с уровнем мощности 0,4 — 7,5 кВт.
Сборка преобразователя частот своими руками
Одновременно с промышленным производством частотных преобразователей, остаётся актуальной сборка подобного устройства своими руками. Особенно этому способствует относительная простота процесса. В результате работы инвертора производится преобразование одной фазы в три.
Применение в бытовых условиях электрических двигателей, имеющих в комплектации подобное устройство, не вызывает никаких дополнительных затруднений. Поэтому можно смело браться за дело.

На рисунке структурная схема частотных преобразователей со звеном постоянного тока.
Схемы частотного преобразователя, используемые при сборке, состоят из выпрямительного блока, фильтрующих элементов (отвечающих за отсечение переменной составляющей тока и конструируемых из IGBT-транзисторов). По стоимости покупка отдельных компонентов преобразователя и выполнение сборки своими руками обходится дешевле, чем приобретение готового устройства.
Применять самосборные частотные преобразователи можно в электродвигателях имеющих мощность 0,1 — 0,75 кВт.
В то же время, современные заводские частотники имеют расширенную функциональность, усовершенствованные алгоритмы и улучшенный контроль безопасности рабочего процесса ввиду того, что при их производстве используются микроконтроллеры.
Сферы применения преобразователей:
- Машиностроение;
- Текстильная промышленность;
- Топливно-энергетические комплексы;
- Скважинные и канализационные насосы;
- Автоматизация управления технологическим процессом.
Стоимость электродвигателей находится в прямой зависимости от того, есть ли в его комплектации преобразователей.
Классификация частотников
По величине и типу электропитания различают инверторы нескольких видов:
- однофазные;
- трёхфазные;
- высоковольтные агрегаты.
Полупроводниковые частотные преобразователи производят преобразование тока или напряжения промышленной сети. Выходные параметры необходимого сигнала свободно регулируются элементами управления.
Для чего может быть нужен электродвигателю частотный преобразователь
Применение частотных преобразователей позволяет снизить затраты на электроэнергию, расходы на амортизацию двигателей и оборудования. Их возможно использовать для дешевых двигателей с короткозамкнутым ротором, что снижает издержки производства.
Многие электродвигатели работают в условиях частой смены режимов работы (частые пуски и остановки, изменяющуюся нагрузку). Частотные преобразователи позволяют плавно запускать электродвигатель и снижают максимальный пусковой момент и нагрев оборудования. Это важно, например, в грузоподъемных машинах и позволяет снизить негативное влияние резких пусков, а также исключить раскачивание груза и рывки при остановке.
При помощи ПЧ можно плавно регулировать работу нагнетательных вентиляторов, насосов и позволяет автоматизировать технологические процессы (применяются в котельных, на горнодобывающих производствах, в нефтедобывающей и нефтеперерабатывающей сферах, на водопроводных станциях и других предприятиях).
Использование частотных преобразователей в транспортерах, конвейерах, лифтах позволяет увеличить срок службы их узлов, так как снижает рывки, удары и другие негативные факторы при пусках и остановке оборудования. Они могут плавно увеличивать и уменьшать частоту вращения двигателя, осуществлять реверсивное движение, что важно для большого количества высокоточного промышленного оборудования.