История робототехники: как выглядели самые первые роботы?
Вот уже несколько сотен лет подряд человечество хочет максимально облегчить себе жизнь, переложив выполнение сложных задач на плечи роботов. И это у нас весьма хорошо получается, потому что уже сегодня любой желающий может купить робота-пылесоса за не такие уж и большие деньги и забыть о мытье полов. В больницах некоторых стран стран частью персонала являются роботы, предназначенные для ухаживания за пациентами. А на заводах производственные механизмы в автоматическом режиме собирают электронику и даже огромные автомобили. Но когда человечество вообще задумалось о разработке роботов и когда изобретателям удалось их создать? Многие скажут, что первого робота в мире создал всем известный Леонардо да Винчи — ведь неспроста среди его документов имелась схема сборки человекоподобного механизма? Но, на самом деле, первые роботы были созданы задолго до рождения итальянского художника и ученого.
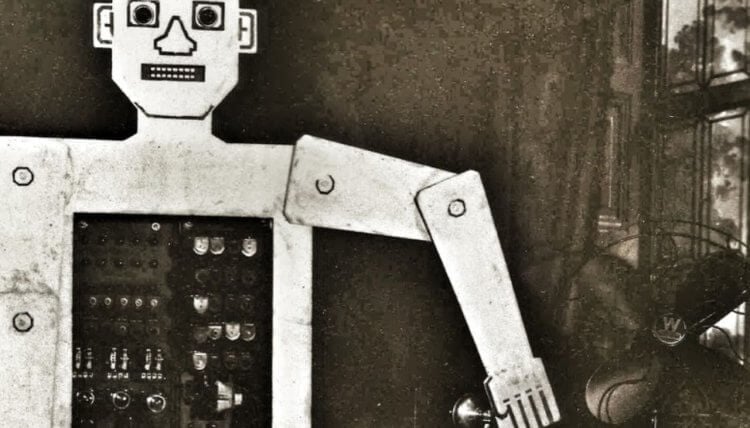
«Мистер Телевокс» — один из первых американских роботов
Какие бывают роботы?
Слово «робот» произошло от слова robota, что можно перевести как «подневольный труд». То есть то, что называется «роботом», вопреки своей воле должно выполнять команды и по своей сути являться рабом. А если быть точнее, термин подразумевает под собой устройство, которое предназначено для выполнения определенного рода действий по заранее заданной инструкции. Обычно роботы получают информацию об окружающей обстановке со встроенных датчиков, которые играют роль органов чувств. А выполнением задач они занимаются либо самостоятельно, следуя заложенной программе, либо повинуясь командам другого человека. Назначение роботов может быть разным, начиная от развлечения людей и заканчивая сборкой сложных устройств.

Роботы бывают разные, но главное, чтобы они не вредили людям
Интересный факт: американский писатель-фантаст Айзек Азимов (Isaac Asimov) является автором трех законов робототехники. Первый — робот не может причинить вред человеку. Второй — робот должен повиноваться всем командам человека кроме тех, которые противоречат первому закону. Третье — робот должен заботиться о себе в ой мере, которая не противоречит первому и второму законам.
Первые роботы в истории
Если верить историческим данным, первые роботы в мире были созданы примерно в 300 году до нашей эры. Тогда, на маяке египетского острова Фарос, были установлены две огромные фигуры в виде женщин. В дневное время они хорошо освещались сами по себе, а ночью загорались искусственным светом. Время от времени они поворачивались и били в колокол, а ночью издавали громкие звуки. И все это делалось для того, чтобы прибывающие корабли вовремя узнавали о приближении к берегу и готовились к остановке. Ведь иногда, при возникновении тумана или кромешной ночи, берег можно было и не заметить. И этих женщин вполне можно назвать роботами, ведь их действия точно соответствуют значению слова «робот».

Маяк на острове Фарос
Робот Леонардо да Винчи
Изобретателем одного из первых роботов считается итальянский ученый Леонардо да Винчи. Судя по документам, обнаруженным в 1950-е годы, художник разработал чертеж человекоподобного робота в 1495 году. В схемах был изображен каркас робота, который был запрограммирован выполнять человеческие движения. Он обладал анатомически правильной моделью челюсти и умел садиться, двигать руками и шеей. Записи гласили, что поверх каркаса должна быть надета рыцарская броня. Скорее всего, идея создать «искусственного человека» пришла в голову художнику в ходе изучения человеческого тела.

К сожалению, ученым не удалось найти подтверждений тому, что робот Леонардо да Винчи действительно был создан. Скорее всего, идея так и осталась на бумаге и так и не была воплощена в реальность. Зато робот был воссоздан в современности, спустя сотни лет после разработки чертежа. Сборкой робота занялся итальянский профессор Марио Таддей, который считается экспертом по изобретениям Леонардо да Винчи. При сборке механизма он строго следовал чертежам художника и в конечном итоге создал то, чего хотел добиться изобретатель. Конечно, широкими возможностями этот робот не блещет, но зато профессор смог написать книгу «Машины Леонардо да Винчи», которая была переведена на 20 языков.
Первый робот-музыкант
Спустя несколько сотен лет после Леонардо да Винчи, попытки создать искусственного человека предпринимал французский механик Жак де Вокансон. Если верить историческим документам, в 1738 году ему удалось создать робота, строение которого полностью копирует анатомию человека. Он не мог ходить, зато отлично играл на флейте. Благодаря конструкции из множества пружин и устройств для вдувания воздуха в различные части механизма, робот-флейтист мог играть на духовом инструменте при помощи своих губ и движущихся пальцев. Демонстрация робота прошла в Париже и была описана в научном труде «Le mécanisme du fluteur automate».
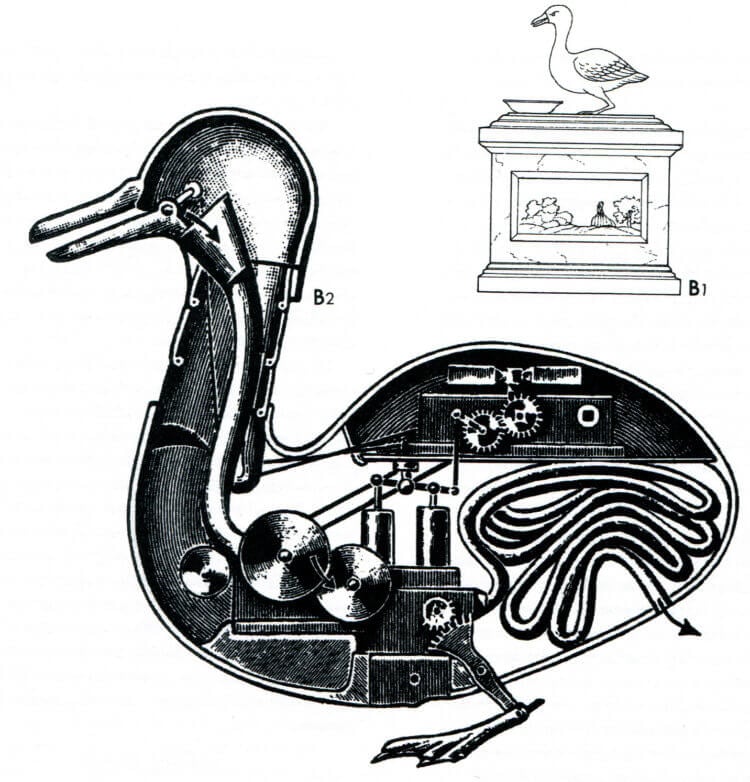
Схема медной утки Жака де Вокансона
Помимо человекоподобного робота, Жак де Вокансон создал роботизированных уток из меди. По своей сути они были механическими игрушками, которые умели двигать крыльями, клевать корм и, как бы странно это не звучало, «испражняться». Сегодня такие технологии выглядели бы крайне странно. К тому же, подобные игрушки уже можно свободно купить в любом детском магазине. Там найдутся как ходячие фигурки, так и сложные роботы с дистанционным управлением. Но сотни лет назад медные утки наверняка казались чем-то волшебным.
Первый советский робот
В XX веке человечество уже осознало перспективы робототехники и всерьез занялось производством роботов. В те времена инженеры хотели создать человекоподобные механизмы, но на настоящих людей они не были похожи. По современным меркам они вовсе были металлическими монстрами, которые практически ничего не умели. Так, в 1928 году, американский инженер Рой Уэнсли показал публике робота «Мистер Телевокс», который умел двигать несколькими конечностями и выполнять простые голосовые команды.
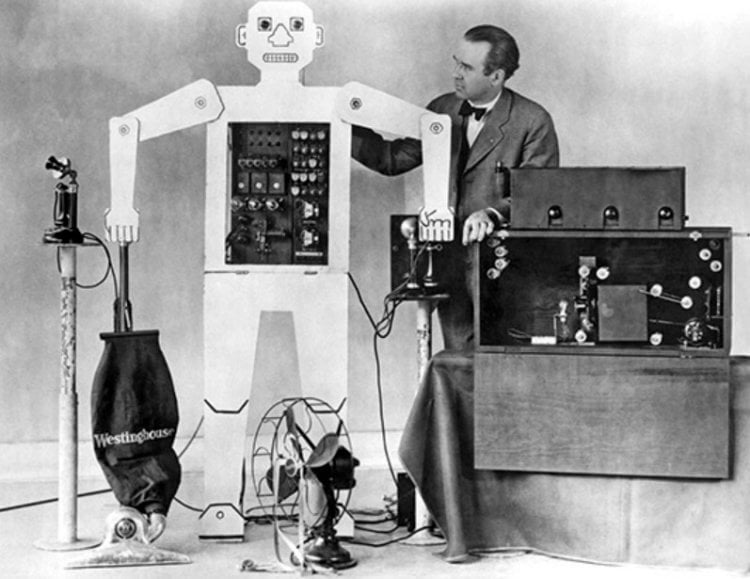
Американский «Мистер Телевокс»
Советский союз тоже не хотел оставаться в стороне. В то время как в других странах разработкой сложных механизмов занимались серьезные дяденьки в толстых очках, в первый советский робот был создан 16-летним школьником. Им оказался Вадим Мацкевич, который в восьмилетнем возрасте создал компактную радиостанцию, а в 12 лет изобрел крошечный броневик, стреляющий ракетами. Он был весьма известным мальчиком и вскоре обзавелся всеми комплектующими, необходимыми для создания полноценного робота.
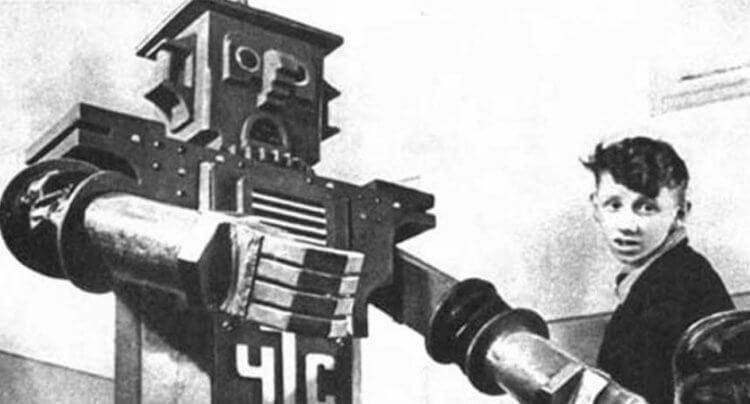
Первый советский робот «В2М»
Советский робот «В2М» был представлен в 1936 году в рамках Всемирной выставки в Париже. Его рост составлял 1,2 метра, а для управления использовалась радиосвязь. Человекоподобный робот умел выполнять 8 команд, которые заключались в движении разными частями тела. Из-за слабости моторов, робот не мог полноценно понимать правую руку и этот жест был похож на нацистское приветствие. Из-за этого недоразумения, робот «В2М» принес мальчику множество проблем и от репрессии его спасли только юношеский возраст и поддержка со стороны начальства органа СССР по борьбе с преступностью.
Вырезка из зарубежной газеты о новой версии робота «В2М»
В 1969 году юные последователи Мацкевича создали нового робота, основанного на конструкции «В2М». Этот андроид был представлен публике в рамках японской выставки «ЭКСПО-70» и тоже привлек к себе внимание мировой общественности. А сам Вадим Мацкевич все это время занимался созданием «технических» игр для школьников написал две популярные книги: «Занимательная история робототехники» и «Как построить робот». Мацкевич умер в 2013 году и в честь него был снят документальный фильм «Как один лейтенант войну остановил».

Современные роботы
Несмотря на все заслуги, титул «отца робототехники» принадлежит не Вадиму Мацкевичу, не Жаку де Вокансону и даже не Леонардо да Винчи. Этот титул был дан американскому инженеру Джозефу Энгельбергеру (Joseph Engelberger), который в 1956 году познакомился с изобретателем Джорджем Деволом (George Devol). Спустя три года со дня знакомства, они представили миру производственного робота Unimate #001. Впоследствии механизм был несколько раз усовершенствован и появился первый робот для сборки автомобилей. Его установили на одном из заводов General Motors для помощи в литье деталей.

Unimate #001 — первый промышленный робот
На протяжении следующих десятилетий робототехника скакнула далеко вперед. Примерно с 1970 по 2000 годы инженеры придумали множество новых датчиков и контроллеров, которыми можно управлять при помощи разных языков программирования. Роботы в современном обличье появились в 1999 году, когда компания Sony представила робота-собаку по кличке AIBO. Она ведет себя живой организм и умеет выполнять практически все собачьи команды.
История роботов AIBO
Вскоре после этого разработкой роботов занялась компания Boston Dynamics. О ней мы часто рассказываем на нашем сайте, а новости об обновлениях фирменных роботов публикуем в нашем Telegram-канале. Разумеется, до совершенства созданным роботам еще далеко и инженерам предстоит проделать много работы.
Что такое робот?
Ссылка на первоисточник — здесь больше порядка с оформлением.
Содержание
Люди называют роботами те вещи, про которые неизвестно, что они делают полезного. Как только робот начинает делать что-то полезное, его перестают называть роботом [1].
Дмитрий Гришин, основатель инвестиционного фонда Grishin Robotics
Введение
Постоянно общаясь с разными людьми, я как человек, некоторым образом по образованию и по роду профессиональной деятельности имеющий отношение к робототехнике, неоднократно сталкивался с различными трактовками понятия «робот». Собрания специалистов в области робототехники иногда сопровождались беспощадными дискуссиями на эту тему. Дискуссии бывали столь же бесплодными в попытке прийти к единому, всеми признаваемому определению, сколь и малоосмысленными, с точки зрения неспециалиста. Какой смысл в словесной эквилибристике, думает обычный человек, если она никак не помогает в решении практических задач?
И действительно, какой смысл?

Независимо от того, какое наиточнейшее определение изобретут сами робототехники, люди все равно будут считать роботом любую рукотворную (искусственно созданную) сущность (механическое устройство или компьютерную программу), которая движется, выполняет работу, производит вычисления — в общем, функционирует — без непосредственного присутствия человека. При этом дистанционное управление люди вполне допускают.
Ситуацию запутывают и сами робототехники, то вводя новые термины для различения роботов от не-роботов (например, «робототехническая система», или «робототехническое устройство», которое, как бы, не совсем робот, «недоробот» из-за недостаточной автономности), то называя роботами устройства, которые, согласно их же определениям, роботами не являются [2].
Немного определений: стандарты по робототехнике
Но не будем голословными. Давайте посмотрим на некоторые определения. Возьмем для начала ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 [3], подготовленный крупными специалистами в данном вопросе — Государственным научным центром РФ ЦНИИ РТК, — цитирую, «на основе собственного перевода… международого стандарта ISO 8373:2012»:
Пойдем по порядку. Итак, слова «исполнительный механизм» говорят нам о том, что робототехники признают роботами только некие механические агрегаты, оснащенные приводами. Этим робототехники отличаются от программистов, которые могут называть роботом или ботом
В конце концов, вполне обычное дело, когда разные области знаний используют одни и те же слова для описания собственных смыслов. Пока просто запомним это разночтение.
Далее в ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 сказано про «определенную степень автономности», понимаемой как
Что ж, без вмешательства так без вмешательства, но зачем тогда называть роботами, например, вот это, и это, и это прекрасные устройства, демонстрируемые на сайте того же ЦНИИ РТК, работающие исключительно при дистанционном управлении человеком-оператором?

По той же причине не подходит под такое определение робота и робот «Фёдор», порадовавший нас в 2019 г. героическим полетом на МКС, поскольку он предназначен для работы под управлением человеком-оператором с помощью задающего устройства-экзоскелета в так называемом копирующем режиме.

Так все же, господа робототехники, роботы это или не роботы?
Кроме того, этакой несколько наивной формулировкой об «определенной степени автономности» разработчики стандарта как бы намекают на свою неспособность дать точное определение термину «робот». Что такое определенная степень автономности и кем она определена? Является ли признаком робота определенная полная автономность, или же определенная никакая — тоже? Впрочем, действительно, на этот вопрос однозначно не ответить, но, по крайней мере, отмечено стремление хоть к какой-нибудь автономности.
Далее имеем неточность в словах «способный перемещаться во внешней среде», так как перемещение представляет собой
Современный промышленный робот-манипулятор, который не изменяет своего местоположения в пространстве, но отвечает другим предъявленным требованиям (программируется по двум и более степеням подвижности и обладает определенной степенью автономности, особенно если, скажем, оснащен техническим зрением), должно быть, с удивлением узнает, что он роботом не является. Здесь была бы более точна формулировка из предшествующего ГОСТ Р ИСО 8373-2014 [7] от ООО «НИИ экономики связи и информатики «Интерэкомс», который как раз и был заменен обсуждаемым более свежим стандартом, а именно: «движущийся внутри своей рабочей среды».

Робот youBot от KUKA — манипулятор на мобильной платформе — способен перемещаться во внешней среде

Промышленные манипуляторы KUKA — неспособны перемещаться во внешней среде
Кстати, в англоязычном оригинале [8] это определение звучит так:
Мне кажется, коллеги из НИИ экономики связи и информатики лучше разобрались в роботах, чем коллеги из ЦНИИ робототехники. Шутка (зато термин «степень подвижности» от ЦНИИ РТК более уместен, чем «ось» от «Интерэкомс»). Но и в целом, ГОСТ Р 60.0.0.4-2019/ИСО 8373:2012 грешит подобными неточностями (где в переводе, а где и в робототехнической терминологии).
Зато в нём же приведена сноска с еще одним, чуть менее противоречивым, определением робота:
Мы обсудили свежие стандарты по робототехнике. А ведь ещё есть и более ранние. Правда, они были выпущены в 1980-х гг. и уже настолько устарели, что вовсе не помогут нам в понимании, что же такое современный робот.
Что ж, будем считать, что со стандартами стало яснее. А вот с роботами — нет. Какая-то путаница.
Продолжение поиска: словари и мнения
Может быть, поискать альтернативные источники, которые сразу нам всё в корне разъяснят?
Если мы посмотрим на определения термина «робот» в различных словарях, то встретим что-то подобное:
Обобщая, выделим те общие понятия, которыми, применительно к роботам, оперируют во всевозможных комбинациях приведенные цитаты:
- робот — это машина;
- антропоморфность, т.е. сходство с человеком — внешнее и/или по выполняемым действиям — с целью замены человека (или иногда и животного?);
- автономность: в диапазоне от полностью автоматического функционирования до всего лишь выполнения сложных последовательностей автоматических действий, а может быть, даже и до дистанционного управления (непосредственно вручную);
- уровень организации программного управления: от выполнения операций по чётко ограниченной заранее заложенной программе до возможности самообучения (а, там же ещё что-то говорилось и про ручное дистанционное управление);
- ещё вот: робот — это то, что придумано писателем Карелом Чапеком… Ой, пожалуй, это не надо.
Фрагмент спектакля по пьесе К. Чапека «R.U.R.» («Россумские универсальные роботы»)
М-да-а-а. Похоже, единственное, в чем полностью сходятся все определения, так это в том, что робот — это машина, т.е. «устройство, выполняющее механические движения с целью преобразования энергии, материалов или информации» [15].
Но подождите. Дадим слово представителю робототехников новой формации — Дмитрию Гришину, основателю инвестиционного фонда Grishin Robotics:
Вот так вот! Дмитрий максимально широко трактует понятие «робот» и относит к роботам и банкоматы, и автомобильные навигаторы, и даже «умные» часы и «умные» камеры! [17]
А если мы вспомним, что многие современные молодые люди, в массе своей больше знакомые с IT, чем с производством, повседневно называют роботами отдельный вид компьютерных программ.
… то, видимо, мы никогда не разберемся, что такое роботы!
Так что же такое робот?
Исходя из приведенных выше определений, если бы мы захотели чёткой однозначности понятий, мы могли бы пойти двумя путями:
- расширительное толкование: считать роботами вообще всё, что подходит хоть под какой-то из перечисленных признаков;
- ограничительное толкование: не признавать роботами вообще ничего, что не соответствует строго всем признакам.
В первом случае ситуация не сильно изменится, в сравнении с имеющимся положением дел. Всё равно сейчас робототехники, условно говоря, как хотят, так и называют свои и чужие разработки.
Во втором случае список известных нам роботов будет нещадно порезан. Роботами останутся считанные единицы. Например, такие, как робот Atlas от Boston Dynamics. По поводу него сомнений не возникает: это робот. Согласно любым определениям. Но таких будет о-о-очень мало. Даже большинство промышленных манипуляторов придется исключить. Так зачем же нам такая терминология «для избранных»?
Думаю, надо честно признать, что на данный момент мы не сможем придумать бесспорное, устраивающее всех определение понятия «робот», которому, к тому же, все будут неукоснительно следовать. Да оно и не нужно! Иначе, разговаривая с не подкованными теоретически людьми (заказчиками, коллегами, знакомыми), мы вынуждены будем постоянно их поправлять: «Нет, это не робот. А вот это, да, кажется робот… Если я не ошибаюсь… Подождите, проверю. » Это утомительно и отвлекает от других дел, полезных.
Итак, во-первых. На уровне обиходного использования вполне можно согласиться с приведенной в начале статьи интуитивной трактовкой неспециалистами понятия «робот» — рукотворной (искусственно созданной) сущности (механического устройства или компьютерной программы), которая движется, функционирует (выполняет работу, производит вычисления) без непосредственного присутствия человека.
Во-вторых. Для себя, мощных робототехников, нам будет полезно знать несколько типовых признаков, характеризующих (но не всегда определяющих) робот:
- приводной механизм — обязательный признак;
- программное управление — обязательный признак;
- выполнение поставленных человеком задач — обязательный признак;
- некоторая (большая или меньшая) автономность — а этот признак размыт даже в своей постановке и отражает, скорее, стремление к автономности.
И при этом мы помним, что в других областях могут быть собственные определения понятия «робот», такие как вот это, родившееся в мире информационных технологий. Виртуальный мир — он вообще склонен переносить понятия из реального мира к себе, одновременно дополняя их своими, новыми смыслами.

Вот так, например, выглядит голосовой бот Robovoice, по мнению его разработчиков
Ну, и в-третьих. Для буквоедов и заядлых классификаторов приведём определение робота на основе взятого из ГОСТ, только немного исправленное:
Вот так. Пусть каждому будет своё, и все будут довольны.
В заключение, в качестве юмора, обращаю внимание на цитату, взятую эпиграфом к данной статье. Не кажется ли вам, что она очень забавно и точно отражает реальность? Действительно, на заводах работают манипуляторы, квартиры убирают пылесосы, в небе летают беспилотники, в космосе — спутники, а на Луну, планеты и астероиды высаживаются зонды, межпланетные станции и планетоходы. Роботы, на самом деле, гораздо раньше заняли место в нашей жизни, чем мы это заметили! Даже если их не называют роботами, имеет ли это для них значение? Нет, они просто делают свою работу. Так что пожелаем всяческих успехов разработчикам стандартов в их трудном и важном деле формулирования точных определений. Для нас же важнее делать нашу работу.
15 различных типов роботов

ИИ и робототехника, несомненно, являются двумя наиболее перспективными направлениями исследований в настоящее время. Эти две области, несомненно, определят будущее человечества. В настоящее время мы располагаем ультрасовременными машинами с изящным дизайном, подвижными и высокопроизводительными корпусами, способными выполнять практически любые виды работ с высокой эффективностью. У нас также есть машинный интеллект, который буквально революционизирует то, как мы выполняем большую часть нашей работы.
Хотя ИИ всегда является интересной темой для разговоров, как мы это делали бесчисленное количество раз здесь, на нашем веб-сайте, давайте сегодня поговорим о роботах. Как вы, наверное, знаете, существует множество различных способов отличить роботов. Вы наверняка знаете хотя бы некоторые из них, но всегда есть и другие.
По сути, роботы делятся на две большие категории: в зависимости от их применения, а вторая основана на кинематике или перемещении. Ниже мы классифицировали роботов только на основе кинематики. Почему это так? Что ж, применение любого предмета, особенно роботов, туманно описывает его характеристики. Например, два разных типа роботов могут выполнять одну и ту же работу, давая одинаковый результат.
Мы упомянули только основные типы роботов, и они подразделяются на кинематику.
Роботизированные манипуляторы или стационарные роботы
1. Декартовы роботы

Декартовы роботы, пожалуй, наиболее распространенный тип роботов, используемых как в промышленных, так и в коммерческих целях. Иногда их называют портальными роботами, они имеют три линейные оси, т.е. Они могут двигаться только по прямой линии, а не вращаться, и установлены под прямым углом. Механическое устройство декартовых роботов намного проще, чем у большинства других стационарных роботов.
2. Цилиндрический робот
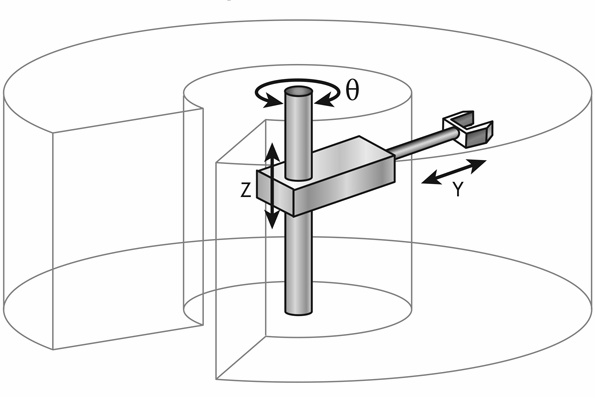
Цилиндрические роботы обычно используются для сборки, точечной сварки и машинного литья под давлением. Хотя в наши дни эти типы роботов относительно редки, они все же могут быть полезны. Как следует из названия, он образует цилиндрическую рабочую систему координат.
Как вы можете видеть на диаграмме выше, цилиндрический робот имеет три оси движения. По оси Z он вращается и перемещается вертикально; а по оси Y он движется линейно. Иногда эти цилиндрические роботы ошибочно принимают за роботов SCARA или наоборот. Несмотря на то, что их рабочая среда почти одинакова, их структура и область применения различаются.
3. Роботы SCARA
SCARA или Selective Compliance Assembly/Articulated Robot Arm (Сочлененный манипулятор робота) более широко используется для сборки во всем мире благодаря простоте и беспрепятственного монтажа.
Роботы SCARA обычно имеют так называемую последовательную архитектуру, в которой один базовый двигатель должен нести все остальные установленные двигатели. Одним из недостатков этих типов роботов является то, что они чрезвычайно дороги по сравнению с довольно недорогими декартовыми роботами. Кроме того, для работы им требуется сложное программное обеспечение высокого уровня.
4. Параллельные роботы

Параллельные роботы более известны как параллельные манипуляторы, в которых связка управляемых машиной роботизированных цепей поддерживает конечный эффектор или просто конечную платформу. Одним из лучших примеров этого типа роботов являются имитаторы полета, которые военные и коммерческие пилоты используют для улучшения своих летных способностей путем моделирования реальных ситуаций.
Слово «параллельный» не должно быть неправильно понято, так как оно подразумевает не геометрическую установку, а, скорее, уникальную характеристику робота данного типа в компьютерной науке. Здесь параллель означает, что конечная точка каждой индивидуальной связи полностью отличается от других.
Параллельный робот специально разработан, чтобы оставаться жестким и противостоять всем нежелательным помехам и движениям, в отличие от серийных роботов-манипуляторов. Хотя каждый привод работает с определенной степенью свободы, их гибкость в конечном итоге ограничивается другими приводами. Его жесткость и прочность отделяют параллельные манипуляторы от серийных цепных роботов.
5. Шарнирные роботы

Когда кто-то говорит о промышленных роботах, есть большая вероятность, что они имеют в виду шарнирных роботов. Эти роботы чрезвычайно универсальны и хорошо подходят для промышленных работ, в отличие от большинства других типов роботов, которые мы показали выше. Эта маневренность и универсальность проистекают из дополнительных осей, которых обычно от четырех до шести, но может достигать и 10. Их основные области применения — погрузочно-разгрузочные работы, дозирование, сварка и т.д.
6. Сферические роботы

По уровню сложности сферические роботы находятся где-то между декартовыми или цилиндрическими роботами и сверхсложными шарнирно-сочлененными роботами. По сути, сферический робот — это робот среднего размера внутри сферического шара, который движется с помощью IDU (Internal Driving Unit). Эти мобильные сферические роботы чрезвычайно эффективны при наблюдении и мониторинге, а также могут использоваться под водой.
Колесные и ножные роботы
7. Одноколесные роботы
Мы все ездили на велосипеде или мотоцикле по крайней мере один раз, но сколько из вас на самом деле ездили на одноколесном велосипеде? Проблема в том, что одноколесные велосипеды нестабильны, как велосипеды, поэтому их сложно удерживать в равновесии, и без надлежащей поддержки можно мгновенно упасть.
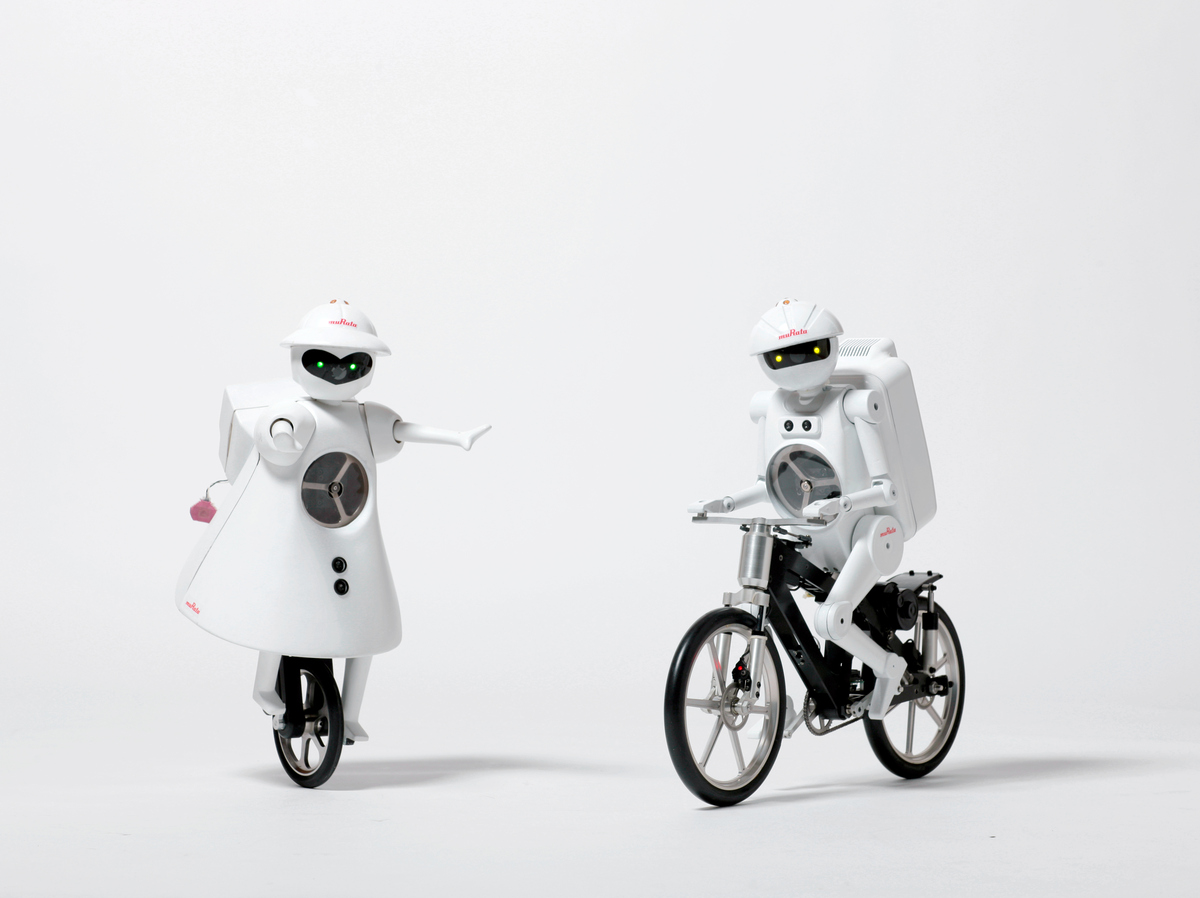
Создание одноколесного робота представляет собой сложную задачу для инженеров, поскольку они должны сделать его динамически стабильным, а также эффективным. Одним из таких примеров одноколесного робота является MURATA GIRL.
Девушка Мурата или Мурата Сейко-чан — моноцикл-робот, произведенный японской компанией по производству электроники Murata. По заявлению компании, у нее есть продвинутые гироскопические датчики, которые позволяют ей поддерживать равновесие, устройство Bluetooth для связи и ультразвуковой датчик для обнаружения целей. Такие компактные роботы могут пригодиться в местах большого скопления людей.
8. Двухколесные роботы
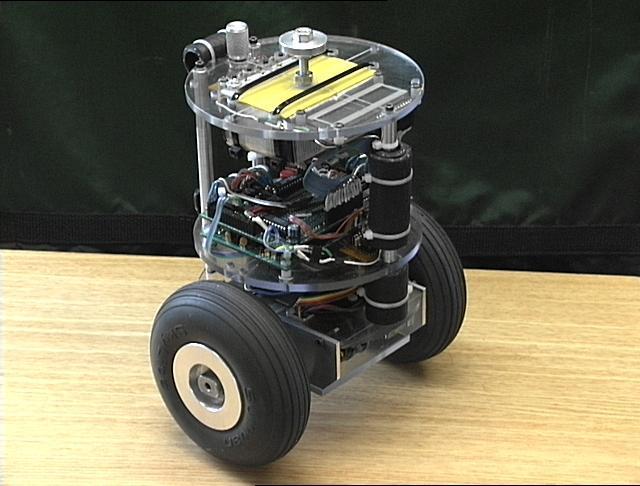
Вы хотите создавать собственных роботов? Если да, то маленькие двухколесные роботы, возможно, для вас правильный путь. Их простой и эффективный дизайн — причина того, что в настоящее время широко распространены двухколесные роботы. Все, что вам нужно, это пара моторов и два колеса для передвижения.
Но, как и у любого другого робота, у них тоже есть свои недостатки. Двухколесные роботы имеют плохой баланс, так как они используют только два колеса с обеих сторон, и они всегда должны быть в движении, чтобы поддерживать вертикальное положение. Чтобы сделать его более устойчивым, батареи устанавливаются непосредственно под их корпусом.
9. Трехколесные роботы
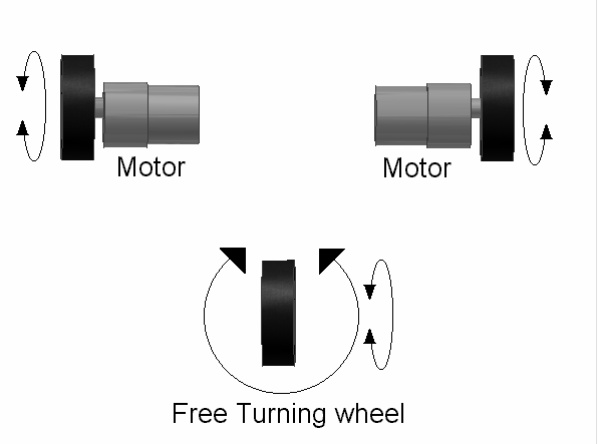
Трехколесные роботы обычно бывают двух типов в зависимости от характера управляемых колес. В первом типе два колеса имеют отдельный привод, в то время как третье колесо вращается свободно для баланса (с дифференцированным управлением). Во втором типе два колеса питаются от одного источника, а третье колесо — от другого.
Для трехколесных роботов с дифференцированным управлением направление, в котором робот движется в данный момент времени, может быть изменено путем изменения относительной скорости вращения двух ведущих колес. Когда два колеса имеют одинаковую скорость вращения и одинаковое направление, робот продолжает движение прямо.
10. Роботы-гуманоиды
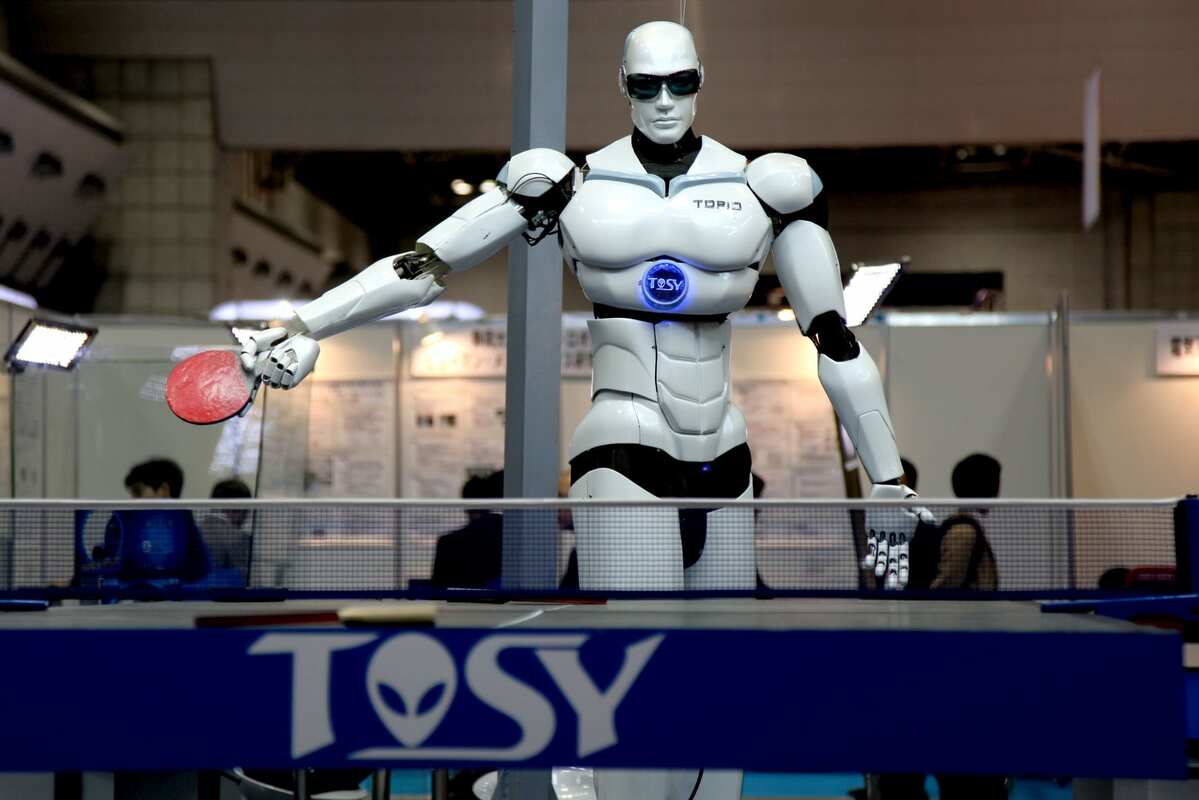
Как следует из названия, робот-гуманоид — это тип робота, который копирует человеческое тело. Дизайн роботов-гуманоидов — это то, что отличает их от других типов мобильных роботов. Типичный робот-гуманоид состоит из головы, двух рук, туловища и двух ног, как и человек, но многие из этих роботов основаны только на какой-то части человеческого тела, например, от пояса вверх или что-то в этом роде.
Одним из основных компонентов робота-гуманоида являются датчики, поскольку они играют ключевую роль в робототехнических парадигмах. Есть два типа датчиков: проприоцептивные и экстероцептивные. Проприоцептивные датчики чувствуют ориентацию робота, его положение и другие моторные навыки, в то время как экстероцептивные включает в себя датчики зрения и звука.
11. Трехногие и четвероногие роботы
Трипедальные или трехножные роботы не так распространены, однако в лаборатории робототехники и механизмов в Вирджинии был разработан радикальный трехножный робот под названием STriDER. Он использует довольно новую концепцию пассивного динамического передвижения для динамической ходьбы и высокой эффективности, которой также можно управлять с минимальным контролем.
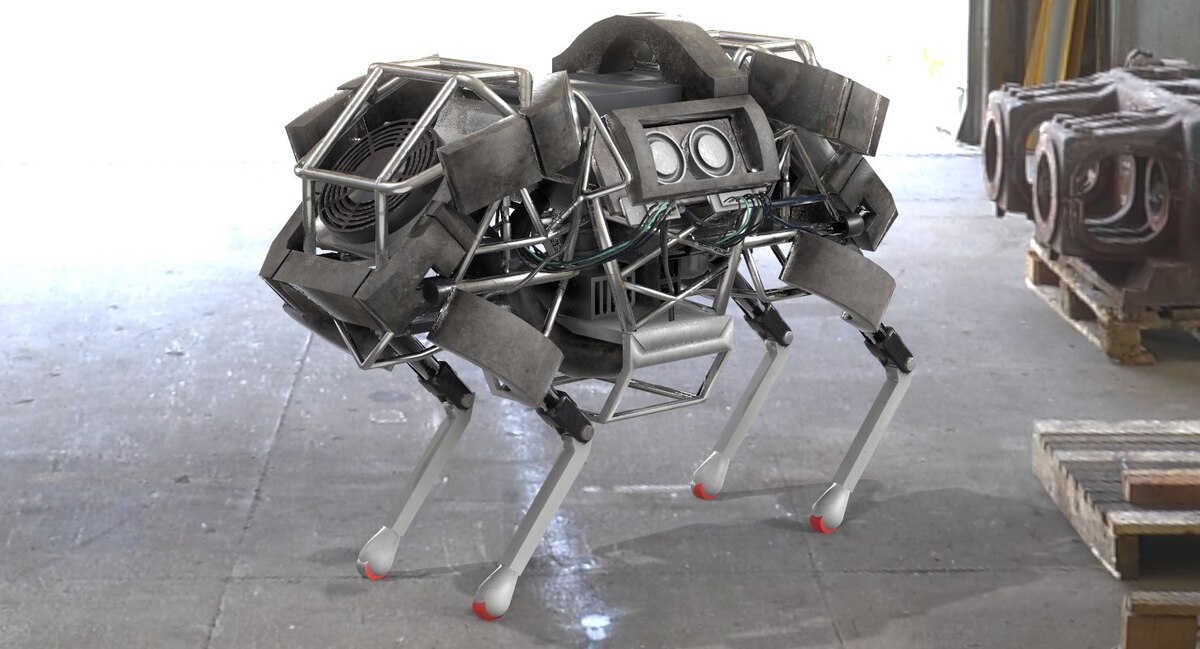
В отличие от трехногих роботов, четвероногие роботы более популярны. Четвероногие роботы, обладают большей устойчивостью, особенно когда они не находятся в движении. Многие четвероногие роботы используют чередующуюся технику ходьбы (попарно). Некоторые из лучших примеров четвероногих роботов — WildCat, Cheetah и Big Dog.
12. Роботы-Гексаподы

В геометрии шестиугольник подразумевает шестигранный многоугольник, поэтому гексапод будет означать робота с шестью ногами, верно? Да, это так. Теперь, когда робот может быть абсолютно устойчивым всего на трех ногах, остальные ноги робота-гексапода обеспечивают большую гибкость и увеличивают его возможности.
Многие, если не все, конструкции гексаподов вдохновлены движением насекомых семейства Hexapoda (по-гречески шестиногих). Они также используются для проверки различных биологических теорий о передвижении и управлении моторикой насекомых. Эти гексаподы используют различные типы походок, чтобы двигаться. Наиболее распространены:
- Чередующийся штатив: из шести возможных одновременно только 3 ноги остаются на земле, и
- Ползание: только одна нога остается на земле, создавая впечатление ползания.
13. Гибридный робот
У нас были роботы с ногами и роботы с колесами, но компания Boston Dynamics, занимающаяся робототехникой, запустила исследовательского робота под названием Handle, который может вырастать до 6,5 футов и путешествовать на короткие расстояния со скоростью 9 миль в час. Он также может прыгать вертикально на высоту до 4 футов.
Хотя у него есть все основные принципы работы, найденные в четвероногом роботе, то есть баланс и мобильные манипуляции, он использует только 10 приводимых в действие суставов, поэтому он намного проще, чем другие Ходячие роботы. С колесами, эффективными на ровном покрытии и ногами на довольно пересеченной местности, «Handle» действительно может справиться с чем угодно.
14. Летающие роботы

Без тени сомнения, летающие роботы — самые популярные типы роботов. Прямо сейчас некоторые крупные транснациональные компании планируют внедрить эти автоматизированные летательные аппараты в свой повседневный бизнес. Эти роботы не просто крутые; они также прочные и аэродинамически надежные.
В некоторых областях Amazon начала доставлять товары с помощью летающих дронов. Эти полностью электрические и автономные дроны могут летать на расстояние до 25 км и доставлять клиентам посылки весом не более 2 кг менее чем за 30 минут.
15. Плавательные роботы
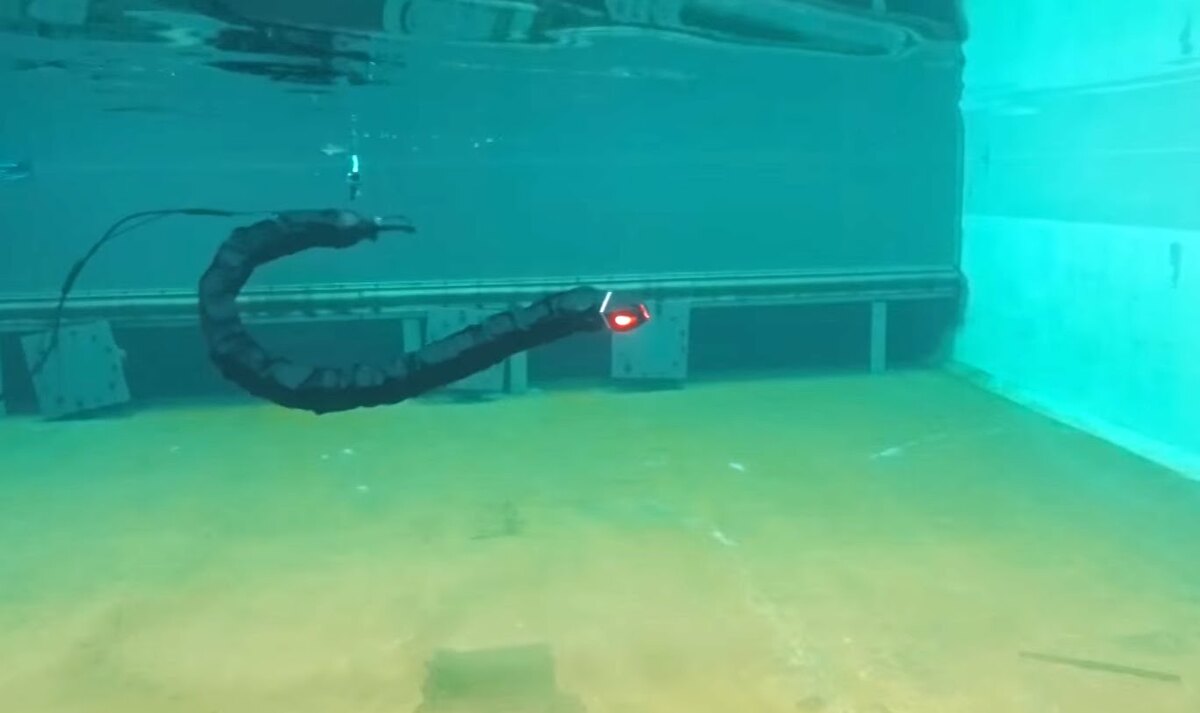
И почему летающие роботы должны быть в центре внимания, почему не плавательные роботы. Да, они такие же крутые, как летающие роботы; Единственная разница в том, что вместо полета они умеют плавать. Эти роботы могут принимать форму насекомых, рыб или большой скользящей змеи.