Серводвигатель принцип работы
Сервопривод с мотором, предназначенный для приведения в движение устройств управления через поворот выходного вала, применяются в таких областях, как открытие и закрытие клапанов, переключатели и так далее. Важными характеристиками сервомотора являются динамика двигателя, равномерность движения, энергоэффективность.
Серводвигатели широко применяются в промышленности, например, в металлургии, в станках с ЧПУ, прессо-штамповочном оборудовании, автомобильной промышленности, тяговом подвижном составе. В основном в сервоприводах использовались 3-полюсные коллекторные двигатели, в которых тяжелый ротор с обмотками вращается внутри магнитов.
Области использования устройства
В современном мире, когда автоматизация заняла прочные позиции во всех областях машиностроения, конструкция всех механизмов заметно унифицировалась. При этом применяются современные индивидуальные приводы. Для того, чтобы понять, сервопривод, что это такое, следует знать сферу применения устройства. Устройства содержат прецизионные конструкции поддержания скорости в промышленных роботах и станках с высокой точностью. Они монтируются на сверлильных оборудованиях, в различных системах транспорта и механизмах вспомогательного характера.
Самое широкое применение приборы нашли в следующих сферах:
- изготовление бумаги и упаковок;
- изготовление листов из металла;
- обрабатывание материалов;
- производство транспортного оборудования;
- изготовление стройматериалов.
Что такое серводвигатель (сервопривод)
Серводвигатель (сервопривод) – это электрический мотор с управлением через обратную отрицательную связь, которая позволяет точно управлять параметрами движения, чтобы достичь необходимой скорости или получить нужный угол поворота. В состав серводвигателя входят непосредственно сам электродвигатель, датчик обратной связи, блок питания и управления.
Положительные стороны серводвигателя (сервопривода)
·Высокая мощность при малых размерах;
·Высокий крутящий момент;
·Быстрый разгон и торможение;
·Постоянное и бесперебойное отслеживание положения;
·Низкий уровень шума, отсутствие вибраций и резонанса;
·Широкий диапазон скорости вращения;
·Высокая скорость разгона;
·Стабильная работа в широком диапазоне скоростей;
·Малая масса и компактная конструкция;
·Низкий расход электроэнергии при малых нагрузках.
Отрицательные стороны серводвигателя (сервопривода)
·Требовательность к периодическому обслуживанию (например, с заменой щеток);
·Сложность устройства (наличие датчика, блока питания и управления) и логики его работы.
Принцип работы
Программа управления серводвигателями Mach3
Основным аспектом функционирования серводвигателей является условия его работы в рамках системы G-кодов, то есть команд управления, содержащихся в специальной программе.
Если рассматривать данный вопрос на примере ЧПУ, то сервомоторы функционируют во взаимодействии с преобразователями, которые изменяют величину напряжения на якоре или на возбуждающей обмотке двигателя, исходя из уровня входного напряжения.
Обычно управление всей системой производится с помощью стойки ЧПУ. При получении команды из стойки пройти определенное расстояние вдоль координатной оси Х, в субблоке цифрового аналогового преобразователя стойки создается напряжение некоторой величины, которое передается для питания привода указанной координаты. В сервомоторе начинается вращение ходового винта, с которым связан энкодер и исполнительный орган станка. В первом происходит выработка импульсов, подсчитываемых стойкой.
Программа предусматривает, что некоторое количество сигналов с энкодера соответствует определенному расстоянию прохождения исполняющего механизма.
При получении нужного количества импульсов аналоговый преобразователь выдает нулевое значение выходного напряжения, и сервомотор останавливается. В случае смещения под внешним воздействием рабочих элементов станка на энкодере формируется импульс, обсчитываемый стойкой, на привод подается напряжение рассогласования, и якорь двигателя поворачивается до получения нулевого значения рассогласования. В результате обеспечивается точное удержание рабочего элемента станка в заданном положении.
Схема и типы сервоприводов
Принцип работы сервопривода основан на обратной связи с одним или несколькими системными сигналами.
Выходной показатель подается на вход, где сравнивается его значение с задающим действием и выполняются необходимые действия — например, выключается двигатель.
Самым простым вариантов реализации является переменный резистор, который управляется валом — при изменении параметров резистора меняются параметры питающего двигатель тока.
В реальных сервоприводов механизм управления гораздо сложнее и использует встроенные микросхемы-контроллеры. В зависимости от типа используемого механизма обратной связи выделяют аналоговые и цифровые сервоприводы. Первые используют что-то похожее на потенциометр, вторые — контроллеры.
Вся схема управления серво находится внутри корпуса, управляющие сигналы и питание подаются, как правило, идут по трем проводам: земля, напряжение питания и управляющий сигнал.
Сервопривод непрерывного вращения 360, 180 и 270 градусов
Выделяют два основных вида серводвигателей — с непрерывным вращением и с фиксированным углом (чаще всего, 180 или 270 градусов).
Отличие серво ограниченного вращения заключается в механических элементах конструкции, которые могут блокировать движение вала вне заданных параметрами углов. Достигнув угла 180, вал окажет воздействие на ограничитель, а тот отдаст команду на выключение мотора. У серводвигателей непрерывного вращения таких ограничителей нет.
Материалы шестерней сервопривода
У большинства сервоприводов связующим звеном между валом и внешними элементами является шестеренка, поэтому очень важно, из какого материала она сделана. Наиболее доступных вариантов два: металлические или пластмассовые шестерни
В более дорогих моделях можно найти элементы из карбона и даже титана.
Пластмассовые варианты, естественно, дешевле, проще в производстве.
Металлические шестеренки надежнее, но это сказывается на цене и на весе модели. Экономные производители могут сделать часть деталей пластмассовыми, а часть металлическими, это тожно нужно иметь в виду. Ну и, естественно, что в самых дешевых моделях даже наличие металлической шестеренки не является гарантией качества.
Титановые или карбоновые шестерни — самый предпочтительный вариант, если вы не ограничены бюджетом. Легкие и надежные, такие сервоприводы активно используются для создания моделей автомобилей, дронов и самолетов.
Преимущества серводвигателей
Широкое использование сервоприводов связано с тем, что они обладают стабильной работой, высокой устойчивостью к помехам, малыми габаритами и широким диапазоном контроля скорости. Важными особенностями сервоприводов являются способность увеличивать мощность и обеспечение обратной информационной связи. И этого следует, что при прямом направлении контур является передатчиком энергии, а при обратном – передатчиком информации, которая используется для улучшения точности управления.
Характеристики сервоприводов
Устройства выпускаются аналогового и цифрового типов. Приводы внешне ничем не отличаются, но различие между ними существенное. Последние обладают более точной отработкой команд, поскольку управление производится микропроцессорами. Для сервоприводов пишутся и вводятся программы. Аналоговые устройства работают от сигналов микросхем. Их преимуществами являются простое устройство и меньшая цена.
Основными параметрами для выбора являются следующие:
- Питание. Подача напряжения производится по трем проводам. По белому передают импульс, через красный — рабочее напряжение, черный или коричневый является нейтральным.
- Размеры: большие, стандартные и микроустройства.
- Скорость. От нее зависит, за какой промежуток времени вал повернется на угол 600. Недорогие устройства обладают скоростью 0,22 сек. Если требуется высокое быстродействие, она составит 0,06 сек.
- Величина момента. Параметр является приоритетным, поскольку при малом вращающем моменте управление затрудняется.
Как управлять цифровым сервоприводом?
Приводы подключаются к программируемым контроллерам, среди которых хорошо известен Arduino. Подключение к его плате производится тремя проводами. По двум подается питающее напряжение, а по третьему — управляющий сигнал.
Инструкция сервопривода с цифровым управлением предусматривает наличие в контроллере простой программы, позволяющей считывать с потенциометра показания и переводить их в число. Затем оно преобразуется в команду передачи на поворот вала сервопривода в заданное положение. Программа записывается на диске, а затем передается на контроллер.
Применение приборов высокого качества необходимо в оборудовании, отличающемся высоким уровнем производительности.
Области использования устройства
- изготовление бумаги и упаковок;
- изготовление листов из металла;
- обрабатывание материалов;
- производство транспортного оборудования;
- деревообрабатывающая промышленность;
- изготовление стройматериалов.
Основные характеристики изделия
Работа сервопривода характеризуется двумя основными показателями: скоростью поворота и усилия на валу. Первая величина служит показателем времени, которое измеряется в секундах. Усилие мерится в кг/см, то есть, какой уровень усилия развивает механизм от центра вращения.
Сейчас выпускают механизмы, функционирующие при показателе напряжения питания от 4,8 до 6 В. Чаще этот показатель равен 6 В. Однако не все модели рассчитаны на широкий диапазон напряжений. Иногда двигатель сервопривода работает лишь при 4,8 В или же только при 6 В (последние конфигурации производятся крайне редко).
Серводвигатели. Устройство, характеристики, типы и виды серводвигателей.
• высокая перегрузочная способность в широком диапазоне частоты вращения.
Кроме того, серводвигатели имеют следующие особенности:
• высокая точность поддержания заданной частоты вращения;
• широкий диапазон регулирования частоты вращения;
• малое время разгона;
• малое время регулирования вращающего момента;
• большой пусковой момент;
• малый момент инерции;
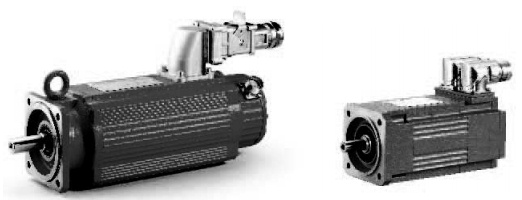
Рис. 1 Пример серводвигателей
Основными элементами конструкции серводвигателя являются:
• элементы для подключения в виде штекерных разъемов или клеммной коробки;
• датчик обратной связи.
1. Обзор современных серводвигателей
Семейство серводвигателей можно разделить на следующие группы:
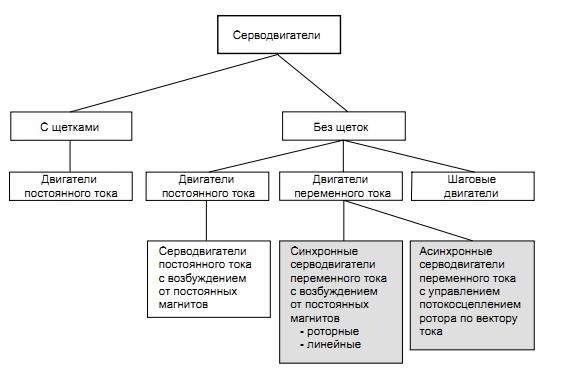
Рис. 2 Обзор серводвигателей
Важнейшие отличительные особенности обусловлены следующими факторами:
• конструкция двигателей (статор, ротор);
• необходимые системы регулирования;
• система обратной связи (датчики).
До недавних лет в качестве сервоприводов применялись бесщеточные двигатели постоянного тока с возбуждением от постоянных магнитов. Управление обеспечивали тиристорные или транзисторные преобразователи-регуляторы.
Благодаря техническому прогрессу в области силовых полупроводниковых приборов и микроконтроллеров в девяностых годах существенно выросло применение синхронных серводвигателей.
Сегодня синхронные серводвигатели переменного тока с возбуждением от постоянных магнитов занимают больший сегмент рынка, чем асинхронные серводвигатели. Это обусловлено характеристиками двигателей.
Далее синхронные серводвигатели переменного тока с возбуждением от постоянных магнитов и асинхронные серводвигатели переменного тока рассматриваются более подробно.
В данной статье для обозначения двигателей используются следующие термины:
• Синхронный серводвигатель — синхронный серводвигатель переменного тока с возбуждением от постоянных магнитов.
• Асинхронный серводвигатель — асинхронный двигатель с датчиком обратной связи, специально спроектированным для работы от преобразователя частоты.
Синхронный линейный двигатель — линейный синхронный серводвигатель переменного тока с возбуждением от постоянных магнитов.
2. Характеристики синхронных и асинхронных серводвигателей
Характеристики синхронных серводвигателей
Характеристики асинхронных серводвигателей
Средняя . высокая динамика.
Умеренно хорошие характеристики регулирования при больших моментах инерции нагрузки.
Хорошие характеристики регулирования при больших моментах инерции нагрузки.
Высокая перегрузочная способность до 6 Мн (номинального момента, зависит от типа двигателя).
Высокая перегрузочная способность (почти 3-кратная).
Высокая допустимая тепловая нагрузка в длительном режиме по всему диапазону частоты вращения.
Высокая допустимая тепловая нагрузка в длительном режиме в зависимости от частоты вращения.
Охлаждение посредством конвекции, теплоотвода и теплового излучения.
Охлаждение крыльчаткой на валу или принудительное.
Высокое качество регулирования частоты вращения.
Высокое качество регулирования частоты вращения.
Возможность длительной работы с пусковым моментом на низких скоростях.
Из-за высокой тепловой нагрузки невозможна длительная работа в нижнем диапазоне частоты вращения без вентилятора принудительного охлаждения.
Широкий диапазон регулирования частоты вращения, 1:5000 и более (зависит от преобразователя).
Широкий диапазон регулирования частоты вращения, 1:5000 и более (зависит от преобразователя).
Пульсация вращающего момента (Cogging) на низкой частоте вращения.
Практически полное отсутствие пульсации вращающего момента (Cogging).
3. Устройство синхронных серводвигателей
Основными элементами конструкции синхронного серводвигателя являются:
• ротор с постоянными магнитами;
• статор с соответствующей обмоткой;
• элементы для подключения в виде штекерного разъема или клеммной коробки;
• датчик обратной связи.
Различают следующие варианты синхронных серводвигателей:
• исполнение с корпусом — корпусные двигатели;
• исполнение без корпуса — бескорпусные двигатели.
Исполнение без корпуса означает, что роль корпуса двигателя выполняет пакет пластин статора. Это позволяет полностью использовать весь профиль пакета стальных пластин.
Далее оба варианта исполнения представлены на примере двигателей SEW:
• исполнение с корпусом: двигатель CMP;
• исполнение с корпусом: двигатель CM/DS;
• исполнение без корпуса: двигатель CMD.
3.1 Устройство двигателя CMP
Серводвигатели CMP отличаются очень высокой динамикой, низким моментом инерции ротора, компактностью и высокой удельной мощностью.
Серводвигатели CMP — это двигатели с корпусом.
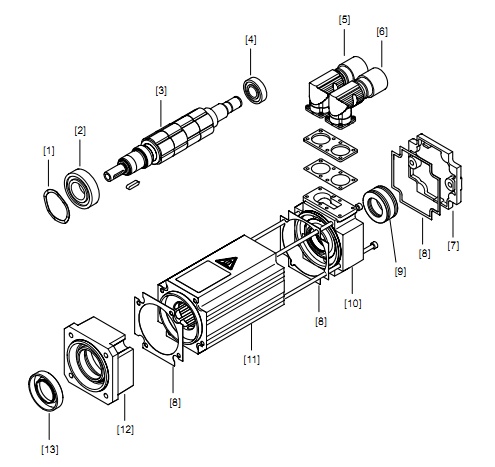
Рис. 3. Устройство синхронного серводвигателя CMP компании SEW-EURODRIVE
1 — Компенсационная шайба
2 — Радиальный шарикоподшипник
4 — Радиальный шарикоподшипник
5 — Сигнальный штекерный разъем SM / SB
6 — Силовой штекерный разъем SM / SB
7 — Крышка корпуса
10 — Задний подшипниковый щит
11 — Корпус со статором
12 — Подшипниковый щит с фланцем
Характеристики и опции двигателя CMP
Перегрузочная способность до 4,5*Мн (номинального момента).
Статор с зубцовой обмоткой.
Возможность монтажа на стандартные редукторы и редукторы для сервопривода через адаптор.
Возможность прямого монтажа на редуктор.
Возможность установки резольвера или датчика абсолютного отсчета с высокой разрешающей способностью.
Изменяемое расположение штекерных разъемов.
Вентилятор принудительного охлаждения (опция).
Тормоз с катушкой 24 В (опция).
Датчик KTY для тепловой защиты двигателя.
3.2 Устройство двигателя CM/DS
Серводвигатели CM/DS отличаются широким диапазоном вращающего момента, хорошими характеристиками регулирования при больших моментах инерции нагрузки, применением мощного рабочего тормоза и разнообразием опций.
Серводвигатели CM/DS — это двигатели с корпусом.
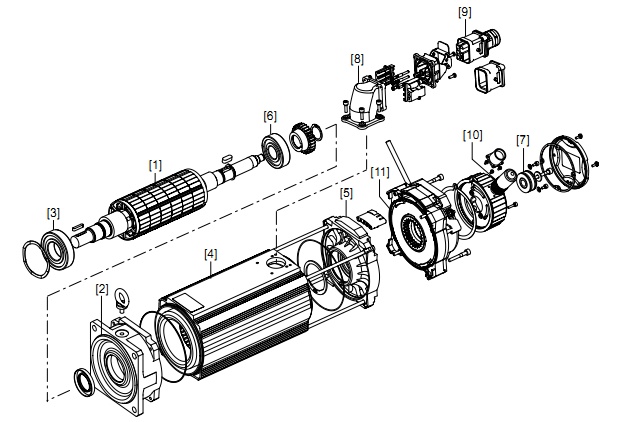
Рис. 4. Устройство синхронного серводвигателя CM компании SEW-EURODRIVE
2 — Подшипниковый щит с фланцем
3 — Радиальный шарикоподшипник
4 — Корпус со статором
5 — Задний подшипниковый щит
6 — Радиальный шарикоподшипник
8 — Корпус штекерного разъема
9 — Штекер силового кабеля, в сборе
10 — Штекер сигнального кабеля, в сборе
11 — Тормоз, в сборе
Характеристики и опции двигателя CM/DS
Перегрузочная способность до 4*Мн (номинального момента).
Статор с шаблонной обмоткой.
Возможность монтажа на стандартные редукторы и редукторы для сервопривода через адаптор.
Возможность прямого монтажа на редуктор.
Возможность установки резольвера или датчика абсолютного отсчета с высокой разрешающей способностью.
Штекерный разъем или клеммная коробка.
Вентилятор принудительного охлаждения (опция).
Рабочий тормоз (опция).
Датчик TF или KTY для тепловой защиты двигателя. 2-й вал со стороны датчика (опция).
Усиленные подшипники (опция).
3.3 Устройство двигателя CMD
Серводвигатели CMD отличаются особой компактностью, оптимальным выбором частоты вращения и набором опций для установок с прямым (безредукторным) приводом.
Серводвигатели CMD — это двигатели без корпуса.
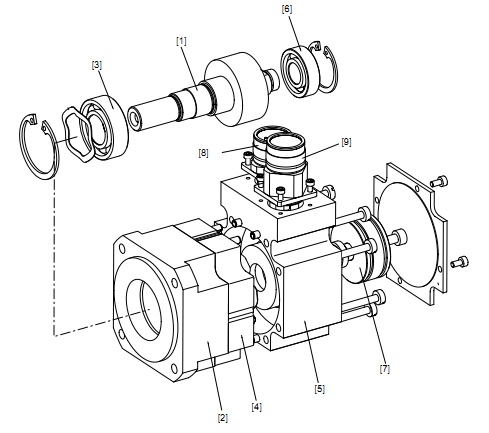
Рис. 5. Устройство синхронного серводвигателя CMD компании SEW-EURODRIVE
2 — Подшипниковый щит с фланцем
3 — Радиальный шарикоподшипник
5 — Задний подшипниковый щит
6 — Радиальный шарикоподшипник
8 — Разъем сигнального кабеля
9 — Разъем силового кабеля
Характеристики и опции двигателя CMD
Почти 6-кратная перегрузочная способность.
Статор с шаблонной обмоткой.
Тормоз с катушкой 24 В (опция).
Возможность установки резольвера или датчика абсолютного отсчета с высокой разрешающей способностью.
Датчик KTY для тепловой защиты двигателя.
3.4 Конструкция ротора
Ротор синхронных серводвигателей оснащен постоянными магнитами.
Рис. 6. Наклеенные на ротор магниты
1 — Наклеенные магниты
Эти магниты, как правило, изготавливаются из спеченного редкоземельного материала неодим-железо-бор. Магнитные свойства этого материала значительно превосходят свойства обычных ферритовых магнитов. Это позволяет сделать конструкцию более компактной при равной выходной мощности.
Что такое сервопривод, как он работает и как им управлять?
Вряд ли сегодня кого-то можно удивить тем количеством электрических приборов, которые окружают человека в повседневной жизни. Многие из которых давно взяли на себя часть человеческого труда и обязанностей. Повсеместная автоматизация процессов охватила самые разнообразные отрасли, начиная автомобилестроением, и заканчивая устройствами в быту. Львиную долю нагрузки относительно автоматического управления параметрами работы умных машин берет на себя сервопривод.
Что такое сервопривод?
Под сервоприводом следует понимать такое устройство, которое обеспечивает возможность управления рабочим органом посредством обратной связи. Само название произошло от латинского servus, что в переводе означает помощник. Изначально сервопривод использовался в качестве вспомогательного оборудования для различных станков, машин и механизмов. Однако с развитием технологий и постоянно растущей необходимостью повышать точность электронных устройств им начали отводить куда более значимую роль.
Устройство и принцип работы

Рис. 1. Устройство сервопривода
Устройство и принцип работы каждого сервопривода может кардинально отличаться от других моделей. Однако в качестве примера мы рассмотрим наиболее актуальные варианты.
Конструктивно он может состоять из:
- Привода – устройства, приводящего в движение рабочий орган. Может выполняться посредством синхронного или асинхронного двигателя, пневмоцилиндра и т.д.
- Передаточный механизм – система шестеренчатой кривошипной или другой передачи, редуктор.
- Рабочий элемент – управляет перемещением в пространстве, непосредственно вал редуктора, передаточный механизм и т.д.
- Датчик – сигнализирует о достигнутом положении и передает информацию по каналу обратной связи.
- Блок питания – может применяться в случае прямого подключения сервопривода к сети, где требуется преобразование уровня и типа напряжения.
- Блок управления – осуществляет подачу управляющих сигналов на сервомотор для передвижения или корректировки места положения. Для этого применяются микропроцессоры, микроконтроллеры и т.д. К примеру, очень популярна плата Arduino.
Принцип действия заключается в подаче управляющего импульса на асинхронный или синхронный двигатель, который начинает вращаться, пока рабочий орган не окажется в нужной позиции. Как только будет достигнуто установленное положение, на датчике обратной связи появится нужный сигнал, который, перейдя на блок управления, прекратит питание электромеханического устройства. Движение сервопривода прекратится до появления новых электрических сигналов.
Далее начнется новый цикл работы устройства, число команд и последовательность их выполнения определяется заложенной программой.
Сравнение с шаговым двигателем

Рис. 2. Сравнение с сервопривода с шаговым двигателем
Вполне вероятно вы могли слышать, что та же функция часто выполняется шаговыми двигателями, однако между этими двумя устройствами имеется существенное отличие. Шаговый привод действительно осуществляет точное позиционирование объекта за счет четкого числа подаваемых на электрическую машину импульсов, они достаточно тихоходны и не создают лишнего шума. В остальном сервоприводы обладают рядом весомых преимуществ по сравнению с шаговыми электродвигателями:
- Могут использовать для привода любой тип электрической машины – синхронный, асинхронный, электродвигатель постоянного тока и т.д.
- Точность механического привода не зависит от износа деталей, появления люфтов, термических и механических изменений конструктивных элементов.
- Диагностирование неисправностей происходит моментально за счет обратной связи.
- Скорость вращения – любой обычный электродвигатель вращается быстрее шагового привода.
- Экономичность – вращение вала у шаговой электрической машины осуществляется при максимально допустимом напряжении питания, чтобы обеспечить максимальный момент.
Но кроме перечисленных преимуществ есть ряд позиций, по которым сервопривод уступает шаговому двигателю:
- Сложность системы управления и необходимость реализации ее работы – шаговый двигатель контролируется обычным счетчиком числа импульсов.
- Необходимость контролировать как частоту вращения, так и принимать меры для принудительного затормаживания в нужной точке – это приводит к дополнительным затратам энергии, программных и механических ресурсов.
- Обязательно используется дополнительный измерительный блок, контролирующий положение рабочего органа.
- Сервопривод обладает значительно большей стоимостью, поэтому применение шагового двигателя обходится дешевле.
Назначение

Рис. 3. Область применения
Сервопривод используется в самых различных направлениях науки и техники, где электрический привод, помимо функции вращения каких-либо элементов, должен выполнить и точное позиционирование. На практике они повсеместно используются в ЧПУ станках, автоматических задвижках, электронных клапанах, заводских станках с программным управлением, робототехнике.
В бытовых системах сервомоторы устанавливаются в системах отопления для регулировки подачи теплоносителя, топлива, управления нагревательным элементом, контроля переключения между центральными и автономными системами энергетических ресурсов и т.д. В автомобилях их используют для отпирания, запирания багажника, электронных блокировок.
Разновидности
За счет многолетнего развития сервоприводов сегодня можно встретить самые различные виды устройства. Поэтому мы рассмотрим наиболее распространенные критерии разделения.
По типу привода:
- асинхронные сервоприводы – получаются дешевле, чем с синхронным электродвигателем, могут обеспечить точность даже при низких оборотах выходного вала;
- синхронные – более дорогой вариант, но быстрее разгоняется, что повышает скорость выполнения операций;
- линейные – не используют классических электрических моторов, но способны развивать большое ускорение.
По принципу действия выделяют:
- электромеханический сервопривод – движение обеспечивается электрической машиной и шестеренчатым редуктором;
- гидромеханический серводвигатель – движение осуществляется при помощи поршневого цилиндра, обладают значительно большей скоростью перемещения;
По материалу передаточного механизма:
- полимерные – износоустойчивые и легкие, но плохо переносят большие механические нагрузки;
- металлические – наиболее тяжелый вариант, относительно быстро изнашиваются, но могут выдерживать любые нагрузки;
- карбоновые – имеют средние характеристики по прочности и износоустойчивости, в сравнении с двумя предыдущими, но имеют более высокую стоимость.
По типу вала двигателя:
- с монолитным ротором – тяжелые сервоприводы, создают вибрацию при вращении;
- с полым ротором – самые легкие модели, быстро реагируют на команды и набирают обороты, их легче контролировать;
- с бесколлекторным ротором – не имеют подвижных контактов, которые создают дополнительное сопротивление вращению, наиболее дорогой вариант.
Технические характеристики
При выборе конкретной модели сервопривода необходимо руководствоваться основными техническими параметрами, которые изготовитель указывает в паспорте устройства.
Наиболее значимыми характеристиками сервомотора являются:
- Усилие на валу серводвигателя – определяет механический момент и способность перемещать определенный вес, создавать усилие при резке, фрезеровке и т.д.
- Скорость вращения – показывает, сколько поворотов вала может совершить устройство за единицу времени.
- Величина питающего напряжения – чаще всего электроснабжение сервопривода выполняется постоянным током, хотя встречаются модели и с переменным током выходного напряжения. Подключение питания к сервоприводу осуществляется тремя проводами: питающим, управляющим и общим.
- Угол вращения сервопривода – поворот выходного элемента, как правило, выпускается на 180° и 360°.
- Скорость поворота – подразделяется на сервоприводы с постоянным вращением и с переменной частотой.
Способы управления

Рис. 7. Способ управления сервоприводом
По способу управления могут быть аналоговые или цифровые сервоприводы, первый из них подает сигналы с разной частотой, которая задается специальной микросхемой, контролирующей работу устройства. Цифровые сервоприводы, в свою очередь, отличаются наличием процессора, который принимает команды и реализует их в качестве различных режимов работы на приводе.
Их практическое отличие заключается в наличии мертвых зон у аналоговых способов, цифровые лишены этого недостатка, к тому же они быстрее реагируют на изменения и обладают большей точностью. Однако цифровой способ управления имеет большую себестоимость и на свою работу он расходует больше электроэнергии.
На рисунке 8 приведен пример управления сервоприводом с помощью подаваемых импульсов:

Рис. 8. Схема управления сервоприводом
Как видите на рисунке, сигнал поступает к генератору опорных импульсов (ГОП), подключенному к потенциометру. Далее сигнал поступает на компаратор (К), сравнивающий величины на выходе схемы и поступающие от датчика на рабочем органе. После этого прибор управления мостом (УМ) открывает нужную пару транзисторов моста для вращения вала мотора (М) по часовой или против часовой стрелки, также может задавать усилие за счет полного или частичного открытия перехода.